Mobile manipulator

Mobile manipulator is nowadays a widespread term to refer to robot systems built from a robotic manipulator arm mounted on a mobile platform. Such systems combine the advantages of mobile platforms and robotic manipulator arms and reduce their drawbacks. For instance, the mobile platform extends the workspace of the arm, whereas an arm offers several operational functionalities.
Description
A mobile manipulation system offers a dual advantage of mobility offered by a mobile platform and dexterity offered by the manipulator. The mobile platform offers unlimited workspace to the manipulator. The extra degrees of freedom of the mobile platform also provide user with more choices. However, the operation of such a system is challenging because of the many degrees of freedom and the unstructured environment that it performs in.
General system composition:
Mobile platform
Robot manipulator
Vision
Tooling
Motivation
At the moment mobile manipulation is a subject of major focus in development and research environments, and mobile manipulators, either autonomous or teleoperated, are used in many areas, e.g. space exploration, military operations, home-care and health-care. However, within the industrial field the implementation of mobile manipulators has been limited, although the needs for intelligent and flexible automation are present. In addition, the necessary technology entities (mobile platforms, robot manipulators, vision and tooling) are, to a large extent, available off-the-shelf components.
A reason for this is that the manufacturing industries act traditionally and, therefore, have reluctance in taking risks by implementing new technologies. Also, within the field of industrial mobile manipulation the centre of attention has been on optimization of the individual technologies, especially robot manipulators and tooling, while the integration, use and application have been neglected. This means that few implementations of mobile robots, in production environments, have been reported – e.g. and.
Components
Mobile robot platform
As a mobile basis, both classic driverless transport systems and mobile robotsbe used. The use of a mobile robot has the advantage that it can navigate freely and autonomously in the room and so the manipulator in case of problems (target out of reach, manipulation of the current position from kinematic not possible, change in the position of the parts to be machined, etc. ) can directly support instead of transporting it only to a fixed position. The maneuverability of the platform is very important. In contrast to FTS, a mobile robot can also approach dynamically assigned positions at any time. However, the classic differential kinematics, especially in the immediate vicinity of workstations, reach their limits and the robot can only be moved by more or less complicated maneuvering. The usageTherefore, omnidirectional drives are becoming increasingly popular.
Storage options
If the mobile manipulator is also to transport objects efficiently, it must be equipped with suitable storage facilities. These can, with appropriate design, also be used to allow the change of the handle, without a second arm is used. (For example, a beer bottle that has been pulled out of the box at the closure has to be parked and gripped on the body before it can be poured in). Larger storage options make the work of the robot more efficient in principle, but also make it harder to navigate the vehicle.
Manipulator arm
This can be both an industrial robot and a specially developed robotic arm. With a selection of small and lightweight robotic arms now commercially available, the use of self-developed arms has declined significantly. (See also: Flexible manipulator arm )
Gripper
The end effector must be selected to suit the item to be manipulated. Anthropomorphic grippers with multiple moving fingers are increasingly available and are used primarily in research.
Image processing
When the robot is to manipulate parts in the work environment, an image processing system is almost always required. If only fixed arm movements are to be carried out, at least the offset between the current and the platform position used during training must be determined and taken into account. In order to take over the tasks of human workers, the robot must also cope with more or less disordered parts (also known as a handle in the box ) or variable storage locations.
Coordinating control
The individual controls of mobile robots and robotic arms have been in use for decades and are well developed. When combining both systems, however, a very large number of possible error and problem cases arise which makes it necessary to add an additional coordinating control. Above all, this should find solutions independently if the ordered manipulation can not be carried out, but it would be possible to do so from another pose. It is helpful to control the entire system as a closed kinematic chain , which is extremely difficult to implement in the implementation due to high redundancy.
Security System
In principle, it is possible to use the safety devices that are used for stationary manipulator arms or normal autonomous vehicles, also for mobile manipulators. However, when a mobile manipulator shares the work area with people or at least other vehicles, the security system is subject to completely new and very demanding requirements, since many possible dangerous situations arise.
Advantages and disadvantages
When combining robotic mobile platforms with robotic arms, the resulting advantages and disadvantages are greater than the sum of their respective parts.
Advantages:
The scope of functions and the possible applications are leaps and bounds.
The entire robot system becomes significantly more independent of supporting systems (loading and unloading stations, materials handling equipment, transfer equipment, …) and can thereby, at least theoretically, become cheaper.
Mobile manipulators also make it possible to automate more complex physical activities that previously could only be performed by humans and often cause health problems due to exercise.
The overall system can react much more flexibly to inaccuracies and deviations, for example by tracking the base of the arm when an object is not directly accessible.
Disadvantage:
Due to the requirements of both components, these often interfere with each other:
The arm needs a large stable base to work efficiently, but the platform should be small and light to navigate efficiently.
The shorter the cycle times of the platform, the faster it has to drive and the less accurate target positions are reached. The more inaccurate but the starting position of the arm is known, the longer are due to the required corrections its cycle times.
To increase the life of a battery powered platform, the total weight and power consumption should be minimized. However, a robot arm works all the more efficiently, the more functions (and thus usually also additional components) it combines.
The fact that the working environment of the arm is constantly changing, many previously used auxiliary structures (parts supply with relative to the arm defined end position, unchangeable transfer positions for components, defined lighting, etc.) are no longer or only very difficult to use.
In addition, many mobile manipulators are not flexible enough to be used for fast-changing tasks. This is one of the biggest inhibitions for widespread use even in small and medium-sized businesses.
When interacting with people, completely new hazardous situations arise, which place increased demands on the safety technology and severely limit the proportion of enforceable solutions compared to the already technically feasible solutions.
There are currently no fully compliant standards, guidelines or design proposals for this type of robot, making it difficult to predict the potential legal consequences of injury or damage.
With the increased number of options also disproportionately higher demands on the control of the overall system are connected, especially as regards the autonomous error handling. This also increases the risk of machine downtime.
Areas of application
The potential fields of application of mobile manipulators are diverse and currently not fully foreseeable. Some known applications are:
Home delivery services
Led by the widespread application of beer getten are mainly used in research projects in the field of service robotics preferably tasks for demonstration purposes, which also occur in private households and are accordingly effective in the media. The scientific challenge in these tasks is usually considerably higher than the expected economic benefits.
Care
As the proportion of older and dependent people increases, so will the need for nurses. It is expected that by 2050 the proportion of people in need of care will triple in relation to the number of persons in employment. therefore, in various research projects, especially in Japan, worked hard to care robots.
Picking
Development projects are currently underway to use mobile manipulators in the picking of heavy or unwieldy components. There are mistakes, which can cause high follow-up costs, are prevented. In addition, human workers are freed from long-term unhealthy tasks, which becomes more relevant the further the average age of the workforce increases.
Timeline
| Year | Robot name | Company / Research Institute |
|---|---|---|
| 1996 | Hilare 2bis | LAAS-CNRS, France |
| 2000 | Jaume | Robotic Intelligence Lab, Jaume I University, Spain |
| 2004 | FAuStO | University of Verona, Italy |
| 2006 | Neobotix MM-500 | Neobotix GmbH, Germany |
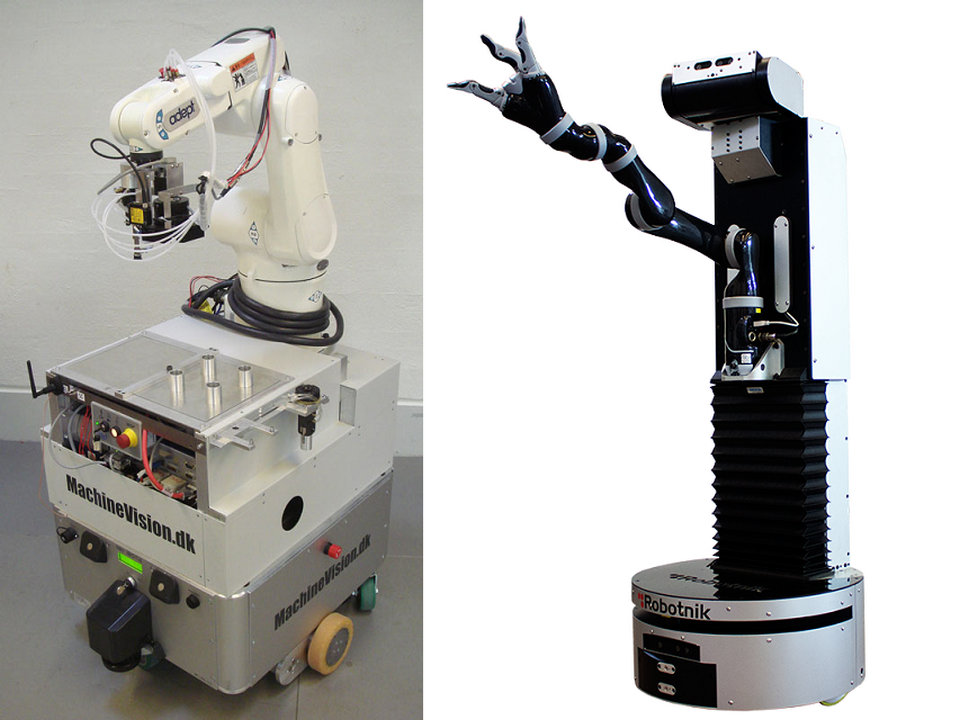
| 2009 | Little Helper | Department of Production, Aalborg University, Denmark |
| 2012 | G-WAM | Robotnik Automation & Barrett Technologies, Spain & United States |
| 2013 | UBR-1 | Unbounded Robotics, United States |
| 2013 | X-WAM | Robotnik Automation & Barrett Technologies, Spain& United States |
| 2015 | CARLoS | AIMEN, Spain |
| 2015 | RB-1 | Robotnik Automation & Kinova Robotics, Spain & Canada |
State of the art
One recent example is the mobile manipulator “Little Helper” from the Department of Production at Aalborg University.
Source from Wikipedia