Solenoide

Un actuador es un componente de una máquina que se encarga de mover y controlar un mecanismo o sistema, por ejemplo abriendo una válvula. En términos simples, es un «motor».
Un actuador requiere una señal de control y una fuente de energía. La señal de control es de energía relativamente baja y puede ser voltaje o corriente eléctrica, presión neumática o hidráulica, o incluso potencia humana. Su principal fuente de energía puede ser una corriente eléctrica, presión de fluido hidráulico o presión neumática. Cuando recibe una señal de control, un actuador responde convirtiendo la energía de la señal en movimiento mecánico.
Un actuador es el mecanismo mediante el cual un sistema de control actúa sobre un entorno. El sistema de control puede ser simple (un sistema mecánico o electrónico fijo), basado en software (por ejemplo, un controlador de impresora, un sistema de control de robot), un humano o cualquier otra entrada.
Historia
La historia del sistema de accionamiento neumático y el sistema de accionamiento hidráulico se remontan a la época de la Segunda Guerra Mundial (1938). Fue creado por primera vez por Xhiter Anckeleman (pronunciado ‘Ziter’), quien utilizó su conocimiento de los motores y los sistemas de frenos para crear una nueva solución que garantice que los frenos de un automóvil ejerzan la máxima fuerza, con el menor desgaste posible.
Hidráulico
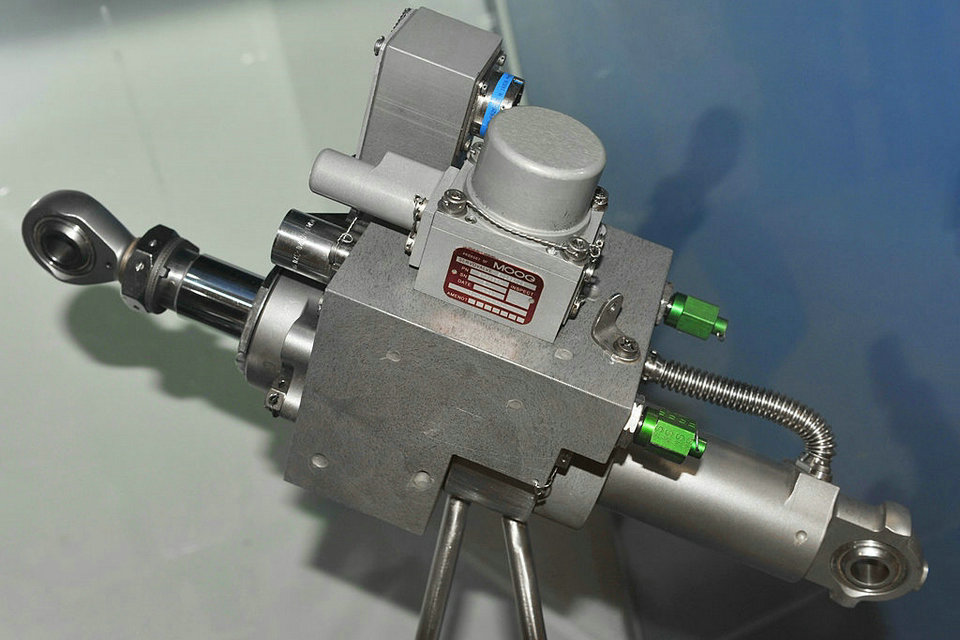
Un actuador hidráulico consiste en un cilindro o motor de fluido que utiliza energía hidráulica para facilitar la operación mecánica. El movimiento mecánico da una salida en términos de movimiento lineal, rotatorio u oscilatorio. Como los líquidos son casi imposibles de comprimir, un actuador hidráulico puede ejercer una gran fuerza. El inconveniente de este enfoque es su limitada aceleración.
El cilindro hidráulico consiste en un tubo cilíndrico hueco a lo largo del cual puede deslizarse un pistón. El término de acción simple se usa cuando la presión del fluido se aplica a un solo lado del pistón. El pistón se puede mover en una sola dirección, usándose frecuentemente un resorte para dar al pistón una carrera de retorno. El término doble efecto se usa cuando se aplica presión en cada lado del pistón; Cualquier diferencia de presión entre los dos lados del pistón mueve el pistón a un lado o al otro.
Neumático
Los actuadores neumáticos permiten producir fuerzas considerables a partir de cambios de presión relativamente pequeños. Un actuador neumático convierte la energía formada por vacío o aire comprimido a alta presión en un movimiento lineal o rotativo. La energía neumática es deseable para los controles del motor principal porque puede responder rápidamente al arrancar y detenerse, ya que la fuente de alimentación no necesita almacenarse en reserva para su funcionamiento. Además, los actuadores neumáticos son más seguros, baratos y, a menudo, más fiables y potentes que otros actuadores. Estas fuerzas se usan a menudo con válvulas para mover diafragmas y afectar el flujo de aire a través de la válvula.
Eléctrico
Un accionador eléctrico funciona con un motor que convierte la energía eléctrica en un par mecánico. La energía eléctrica se utiliza para accionar equipos como las válvulas de giro múltiple. Además, normalmente se instala un freno sobre el motor para evitar que el medio abra la válvula. Si no se instala ningún freno, el actuador destapará la válvula abierta y la girará a su posición cerrada. Si esto sigue sucediendo, el motor y el actuador eventualmente se dañarán. Es una de las formas de actuador más limpias y más fácilmente disponibles porque no involucra directamente el petróleo u otros combustibles fósiles.
La estructura de un actuador eléctrico es simple en comparación con la de los actuadores hidráulicos y neumáticos, ya que solo requieren energía eléctrica como fuente de energía. Como los cables eléctricos se usan para transmitir electricidad y señales, es muy versátil y prácticamente no hay restricciones con respecto a la distancia entre la fuente de energía y el actuador.
Hay una gran cantidad de modelos y es fácil usarlos con motores eléctricos estandarizados dependiendo de la aplicación. En la mayoría de los casos es necesario usar reductores, ya que los motores son de operación continua.
Uso de un pistón eléctrico para accionar una válvula pequeña.
La forma más simple para el accionamiento con un pistón, sería la instalación de una palanca integral con una bisagra unida a una superficie paralela al eje del pistón de accionamiento y las entradas roscadas.
Hay Muscular Wires®, que permiten movimientos silenciosos sin motores. Es la tecnología más innovadora para robótica y automatización, así como para la implementación de pequeños actuadores.
También hay polímeros electroactivos, PEA (por sus siglas en español) o EAP (por sus siglas en inglés), que son polímeros que generalmente cambian de forma o tamaño cuando son estimulados por un campo eléctrico. Se utilizan principalmente como actuadores, sensores o la generación de músculos artificiales para ser utilizados en robótica y prótesis.
Polímero retorcido y enrollado (TCP) o polímero superenrollado (SCP)
El actuador de polímero torcido y enrollado (TCP) también conocido como actuador de polímero superenrollado (SCP) es un polímero enrollado que puede ser accionado por energía eléctrica. Un actuador TCP parece un resorte helicoidal. Los actuadores TCP generalmente están hechos de nylon recubierto de plata. Los actuadores TCP también se pueden hacer con otra capa de conductancia eléctrica como el oro. El actuador TCP debe estar bajo una carga para mantener el músculo extendido. La energía eléctrica se transforma en energía térmica debido a la resistencia eléctrica, que también se conoce como calentamiento Joule, calentamiento óhmico y calentamiento resistivo. A medida que la temperatura del actuador TCP aumenta por calentamiento de Joule, el polímero se contrae y provoca la contracción del actuador.
Actuadores piezoeléctricos
Son aquellos dispositivos que producen movimiento (desplazamiento) aprovechando el fenómeno físico de la piezoelectricidad. Los accionadores que utilizan este efecto han estado disponibles durante aproximadamente 20 años y han cambiado el mundo del posicionamiento. El movimiento preciso que se produce cuando se aplica un campo eléctrico al material es de gran valor para la nanoposición.
Es posible distinguir los siguientes tipos:
Tipo de pila
De tipo «Flexure»
Combinado con sistema de posicionamiento motorizado de alto rango.
Térmica o magnética
Los actuadores que pueden accionarse mediante la aplicación de energía térmica o magnética se han utilizado en aplicaciones comerciales. Los actuadores térmicos tienden a ser compactos, ligeros, económicos y con alta densidad de potencia. Estos actuadores utilizan materiales con memoria de forma (SMM), como aleaciones con memoria de forma (SMA) o aleaciones con memoria de forma magnética (MSMA). Algunos fabricantes populares de estos dispositivos son Finnish Modti Inc., American Dynalloy y Rotork.
Mecánico
Un actuador mecánico funciona para ejecutar el movimiento al convertir un tipo de movimiento, como el movimiento giratorio, en otro tipo, como el movimiento lineal. Un ejemplo es un piñón y cremallera. El funcionamiento de los actuadores mecánicos se basa en combinaciones de componentes estructurales, como engranajes y rieles, o poleas y cadenas.
Actuadores electronicos
Los actuadores electrónicos también se utilizan ampliamente en dispositivos mecatrónicos, como los robots. Los servomotores de CA sin escobillas se utilizarán en el futuro como actuadores de posicionamiento precisos debido a la demanda de funcionamiento sin tantas horas de mantenimiento como energía nuclear.
Actuadores hidraulicos
Los actuadores hidráulicos, que son los más antiguos, pueden clasificarse de acuerdo con la forma de operación, operan sobre la base de fluidos presurizados. Hay tres grupos principales:
Cilindro hidráulico
motor hidráulico
motor basculante hidráulico
Cilindro hidráulico
Según su función podemos clasificar los cilindros hidráulicos en 2 tipos: efecto simple y doble acción. En el primer tipo, la fuerza hidráulica se utiliza para empujar y una fuerza externa, diferente, para contraerse. El segundo tipo utiliza energía hidráulica para realizar ambas acciones. El control de la dirección se realiza mediante un solenoide. En su interior tienen un resorte que cambia su constante elástica con el paso de la corriente. Es decir, si la corriente fluye a través del pistón eléctrico, se puede extender fácilmente.
Cilindro de presion dinamica
Llevar la carga en la base del cilindro. Los costos de fabricación son generalmente bajos ya que no hay piezas que se deslicen dentro del cilindro.
Cilindro de efecto simple
La barra está solo en un extremo del pistón, que se contrae mediante resortes o por la misma gravedad. La carga solo se puede colocar en un extremo del cilindro.
Cilindro de doble efecto
La carga se puede colocar a ambos lados del cilindro. Se genera un impulso horizontal debido a la diferencia de presión entre los extremos del pistón
Cilindro telescópico
La barra tipo tubo de varias etapas se empuja sucesivamente a medida que se aplica al cilindro de aceite presurizado. Se puede lograr una carrera relativamente larga en comparación con la longitud del cilindro
Motor hidraulico
En los motores hidráulicos el movimiento rotativo es generado por la presión. Estos motores se pueden clasificar en dos grandes grupos: el primero es un tipo giratorio en el que los engranajes son impulsados directamente por aceite a presión, y el segundo, de tipo oscilante, el movimiento giratorio es generado por la acción oscilatoria de un pistón o martillo; Este tipo tiene mayor demanda debido a su mayor eficiencia. A continuación se muestra la clasificación de este tipo de motor.
Motor de engranajes
Motor rotativo tipo paleta
Motor de hélice
Motor hidráulico motor excéntrico de levas
Piston axial
Tipo oscilante Motor con eje inclinado.
Motor de engranajes: la presión del aceite fluye desde la entrada y actúa sobre la cara dentada de cada engranaje, generando un par en la dirección de la flecha. La estructura del motor es simple, por lo que se recomienda su uso en operaciones de alta velocidad.
Motor con pistón de eje inclinado.
El aceite presurizado que fluye desde la entrada empuja el pistón contra la brida y la fuerza resultante en la dirección radial hace que el eje y el bloque de cilindros giren en la dirección de la flecha. Este tipo de motor es muy conveniente para aplicaciones de alta presión y alta velocidad. Es posible modificar su capacidad cambiando el ángulo de inclinación del eje.
Motor oscilante con pistón axial.
Su función es absorber un cierto volumen de fluido bajo presión y devolverlo al circuito cuando lo necesite.
Actuadores neumaticos
Los mecanismos que convierten la energía del aire comprimido en trabajo mecánico se llaman actuadores neumáticos. Aunque en esencia son idénticos a los actuadores hidráulicos, el rango de compresión es menor en este caso, además de que existe una pequeña diferencia en términos de uso y en cuanto a la estructura, motivada por los elementos de suministro de energía (aire) Son diferentes a los utilizados en cilindros hidráulicos.
En esta clasificación aparecen los fuelles y diafragmas, que utilizan aire comprimido y se consideran como simples actuadores de efecto, y también los músculos de goma artificial, que últimamente han recibido mucha atención.
Efecto simple
Cilindro neumático
Actuador neumático de doble efecto.
Actuador lineal de doble efecto sin vástago.
Con engranaje y cremallera.
Con cremallera y cremallera doble.
Motor neumático con veleta.
Con piston
Con una veleta al mismo tiempo.
Multivalve
Motor rotativo con pistón.
Desde la ranura vertical
Émbolo
Fuelle, diafragma y musculatura artificial.
Cilindro de efecto simple
Paletas rotativas
Son elementos del motor diseñados para proporcionar un giro limitado en un eje de salida. La presión del aire actúa directamente sobre una o dos cuchillas que imprimen un movimiento de giro. Estos no superan los 270 ° y los de palet doble no superan los 90 °.
Partes de un actuador
Sistema de «llave de seguridad»: este método de llave de seguridad para retener las cubiertas del actuador utiliza una cinta cilíndrica flexible de acero inoxidable en una ranura deslizante maquinada a máquina. Esto elimina la concentración de tensiones causadas por cargas centradas en los tornillos de las cubiertas y los helicoils. Las llaves de seguridad aumentan en gran medida la resistencia del conjunto del actuador y proporcionan un bloqueo de seguridad contra el desacoplamiento peligroso.
Piñón con ranura: esta ranura en la parte superior del piñón proporciona una transmisión directa autocentrada para los indicadores de posición y los interruptores de posición, eliminando el uso de bridas de acoplamiento. (Bajo la norma de Namur).
Rodamientos de empalme: Estos rodamientos de empalme roscados y empalmados sirven para simplificar el acoplamiento de los accesorios que se montan en la parte superior. (Bajo normas ISO 5211 y VDI).
Paso de aire grande: los conductos internos para el paso de aire extra grande permiten una operación rápida y evitan su bloqueo.
Muñoneras: un nuevo diseño y máxima durabilidad, lubricado permanentemente, resistente a la corrosión y fácil de reemplazar, extiende la vida útil del actuador en las aplicaciones más severas.
Construcción: Se debe proporcionar fuerza máxima contra abolladuras, choques y fatiga. Su cremallera y piñón deben ser de gran calibre, debe ser mecanizado con maquinaria de alta precisión y elimina el juego para poder obtener posiciones precisas.
Ceramigard: Superficie fuerte, resistente a la corrosión, similar a la cerámica. Protege todas las partes del actuador contra el desgaste y la corrosión.
Recubrimiento: un recubrimiento doble, para proporcionar protección adicional contra ambientes agresivos.
Acoplamiento: Acoplamiento o desacoplamiento de módulos de reemplazo cargados por resorte, o seguridad en caso de falla de presión de aire.
Tornillos de ajuste de carrera: proporciona ajustes para la rotación del piñón en ambas direcciones de desplazamiento; Lo que es esencial para cada válvula de cuarto de vuelta.
Piñones radiales y de carga del piñón: muñones reemplazables que protegen contra cargas verticales. Los silenciadores radiales soportan toda la carga radial.
Sellos de piñón – superior e inferior: los sellos de piñón están colocados para minimizar cada espacio posible, para proteger contra la corrosión.
Resortes de seguridad indestructibles en caso de falla: Estos resortes están diseñados y fabricados para que nunca fallen y, posteriormente, están protegidos contra la corrosión. Los resortes se clasifican y asignan de una manera particular para compensar la pérdida de memoria a la que está sujeto cada resorte; Para una verdadera confianza en caso de fallo en el suministro de aire.
Los actuadores más habituales son:
Cilindros neumáticos e hidráulicos. Realizan movimientos lineales.
Motores (actuadores de giro) neumáticos e hidráulicos. Realizan movimientos de giro mediante energía hidráulica o neumática.
Valvulas Existen controles directos, motorizados, electroneumáticos, etc. Se utilizan para regular el flujo de gases y líquidos.
Resistencias de calentamiento. Se utilizan para calentar.
Motor electrico. Las más utilizadas son la inducción, continua, sin escobillas y paso a paso.
Bombas, compresores y ventiladores. Movido generalmente por motores de inducción eléctricos.
Actuadores blandos impresos en 3D
Se están desarrollando accionadores blandos para manejar objetos frágiles como la cosecha de frutas en la agricultura o la manipulación de los órganos internos en biomedicina, que siempre ha sido una tarea difícil para la robótica. A diferencia de los actuadores convencionales, los actuadores suaves producen un movimiento flexible debido a la integración de cambios microscópicos a nivel molecular en una deformación macroscópica de los materiales del actuador.
La mayoría de los actuadores blandos existentes se fabrican utilizando procesos de bajo rendimiento de varias etapas, tales como micromoldeo, fabricación de forma libre sólida y litografía con máscara. Sin embargo, estos métodos requieren la fabricación manual de dispositivos, el post-procesamiento / ensamblaje y las iteraciones largas hasta que se alcance la madurez en la fabricación. Para evitar los aspectos tediosos y prolongados de los procesos de fabricación actuales, los investigadores están explorando un enfoque de fabricación apropiado para la fabricación efectiva de actuadores blandos. Por lo tanto, se utilizan sistemas blandos especiales que se pueden fabricar en un solo paso mediante métodos rápidos de creación de prototipos, como la impresión 3D, para reducir la brecha entre el diseño y la implementación de los actuadores blandos, lo que hace que el proceso sea más rápido, menos costoso y más sencillo. También permiten la incorporación de todos los componentes del actuador en una sola estructura, eliminando la necesidad de usar juntas externas, adhesivos y sujetadores. Esto resulta en una disminución en el número de partes discretas, pasos de post-procesamiento y tiempo de fabricación.
Los actuadores blandos impresos en 3D se clasifican en dos grupos principales: “actuadores blandos impresos en 3D semi” y “actuadores blandos impresos en 3D”. El motivo de tal clasificación es distinguir entre los actuadores blandos impresos que se fabrican por medio del proceso de impresión 3D en su totalidad y los actuadores blandos cuyas partes están hechas por impresoras 3D y se procesan posteriormente. Esta clasificación ayuda a aclarar las ventajas de los actuadores blandos impresos en 3D sobre los actuadores blandos impresos en 3D, debido a su capacidad de funcionamiento sin la necesidad de ningún otro ensamblaje.
Los actuadores de polímero con memoria de forma (SMP) son los más similares a nuestros músculos, y proporcionan una respuesta a una variedad de estímulos como los cambios de luz, eléctricos, magnéticos, de calor, de pH y de humedad. Tienen algunas deficiencias, como la fatiga y el alto tiempo de respuesta, que se han mejorado mediante la introducción de materiales inteligentes y la combinación de diferentes materiales mediante la tecnología de fabricación avanzada. La llegada de las impresoras 3D ha creado un nuevo camino para la fabricación de actuadores SMP de respuesta rápida y bajo costo. El proceso de recibir estímulos externos como calor, humedad, entrada eléctrica, luz o campo magnético por SMP se denomina efecto de memoria de forma (SME). SMP exhibe algunas características gratificantes como baja densidad, alta recuperación de la tensión, biocompatibilidad y biodegradabilidad.
Los polímeros activados por luz / fotopolímero (LAP) son otro tipo de SMP que se activan por estímulos de luz. Los actuadores LAP se pueden controlar de forma remota con respuesta instantánea y, sin ningún contacto físico, solo con la variación de la frecuencia o intensidad de la luz.
La necesidad de actuadores blandos blandos, ligeros y biocompatibles en robótica blanda ha influido en los investigadores para diseñar actuadores blandos neumáticos debido a su naturaleza de cumplimiento intrínseco y su capacidad para producir tensión muscular.
Los polímeros como los elastómeros dieléctricos (DE), los compuestos metálicos de polímeros iónicos (IPMC), los polímeros electroactivos iónicos, los geles de polielectrolitos y los compuestos de gel y metales son materiales comunes para formar estructuras en capas 3D que pueden adaptarse para funcionar como actuadores blandos. Los actuadores EAP se clasifican como actuadores blandos impresos en 3D que responden a la excitación eléctrica como deformación en su forma.
Ejemplos y aplicaciones.
En ingeniería, los actuadores se utilizan con frecuencia como mecanismos para introducir movimiento, o para sujetar un objeto con el fin de evitar el movimiento. En ingeniería electrónica, los actuadores son una subdivisión de transductores. Son dispositivos que transforman una señal de entrada (principalmente una señal eléctrica) en algún tipo de movimiento.
Ejemplos de actuadores
Unidad de peine
Dispositivo de micromirror digital.
Motor eléctrico
Polímero electroactivo
Cilindro hidráulico
Actuador piezoeléctrico
Actuador neumático
Tornillo de tornillo
Servomecanismo
Solenoide
Motor paso a paso
Aleación de memoria de forma
Bimorfo termal
Actuadores hidraulicos
Conversión circular a lineal
Los motores se usan principalmente cuando se necesitan movimientos circulares, pero también se pueden usar para aplicaciones lineales mediante la transformación de movimiento circular a lineal con un tornillo de avance o un mecanismo similar. Por otro lado, algunos actuadores son intrínsecamente lineales, como los actuadores piezoeléctricos. La conversión entre movimiento circular y lineal se realiza comúnmente a través de algunos tipos de mecanismos simples que incluyen:
Tornillo: El gato de tornillo, el tornillo de bola y los actuadores de tornillo de rodillo funcionan según el principio de la máquina simple conocida como tornillo. Al girar la tuerca del actuador, el eje del tornillo se mueve en línea. Al mover el eje del tornillo, la tuerca gira.
Rueda y eje: El polipasto, el cabrestante, el piñón y el piñón, la transmisión de la cadena, la transmisión de la correa, la cadena rígida y los actuadores de la correa rígida funcionan según el principio de la rueda y el eje. Al girar una rueda / eje (por ejemplo, tambor, engranaje, polea o eje), un miembro lineal (por ejemplo, cable, cremallera, cadena o correa) se mueve. Al mover el miembro lineal, la rueda / eje gira.
Instrumentación virtual
En la instrumentación virtual, los actuadores y los sensores son los complementos de hardware de los instrumentos virtuales.
Métricas de rendimiento
Las métricas de rendimiento para los actuadores incluyen la velocidad, la aceleración y la fuerza (alternativamente, la velocidad angular, la aceleración angular y el par), así como la eficiencia energética y consideraciones como la masa, el volumen, las condiciones de operación y la durabilidad, entre otros.
Fuerza
Al considerar la fuerza en los actuadores para aplicaciones, se deben considerar dos métricas principales. Estos dos son cargas estáticas y dinámicas. La carga estática es la capacidad de fuerza del actuador cuando no está en movimiento. Por el contrario, la carga dinámica del actuador es la capacidad de fuerza mientras está en movimiento.
Velocidad
La velocidad se debe considerar principalmente a un ritmo sin carga, ya que la velocidad disminuirá invariablemente a medida que aumenta la cantidad de carga. La velocidad a la que disminuirá la velocidad se correlacionará directamente con la cantidad de fuerza y la velocidad inicial.
Condiciones de operación
Los actuadores se clasifican comúnmente utilizando el sistema de clasificación de código IP estándar. Aquellos que están calificados para entornos peligrosos tendrán una calificación de IP más alta que aquellos para uso industrial personal o común.
Durabilidad
Esto será determinado por cada fabricante individual, dependiendo del uso y la calidad.