Paradigma robótico

En robótica, un paradigma robótico es un modelo mental de cómo opera un robot. Un paradigma robótico puede ser descrito por la relación entre los tres primitivos de la robótica: la Ley de Plan de Sentido. También puede describirse cómo se procesan y distribuyen los datos sensoriales a través del sistema y dónde se toman las decisiones.
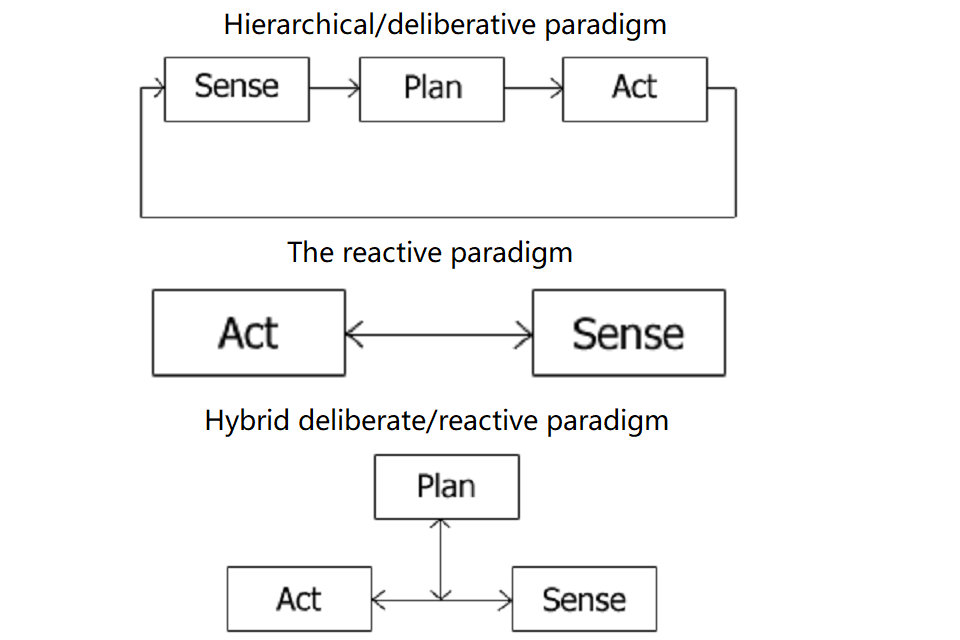
Paradigma jerárquico / deliberativo.
El robot funciona de arriba a abajo, con una gran planificación.
El robot siente el mundo, planea la siguiente acción, actúa; En cada paso el robot planifica explícitamente el siguiente movimiento.
Todos los datos de detección tienden a reunirse en un modelo mundial global.
El paradigma reactivo.
Sense-act tipo de organización.
El robot tiene múltiples instancias de acoplamientos Sense-Act.
Estos acoplamientos son procesos concurrentes, llamados comportamientos, que toman los datos de la detección local y calculan la mejor acción a tomar independientemente de lo que estén haciendo los otros procesos.
El robot hará una combinación de comportamientos.
Paradigma híbrido deliberado / reactivo.
El robot primero planea (delibera) cómo descomponer mejor una tarea en subtareas (también llamada «planificación de la misión») y luego cuáles son los comportamientos adecuados para realizar cada subtarea.
Entonces los comportamientos comienzan a ejecutarse según el Paradigma Reactivo.
La organización sensorial es también una mezcla de estilos jerárquicos y reactivos; los datos del sensor se enrutan a cada comportamiento que necesita ese sensor, pero también está disponible para el planificador para la construcción de un modelo mundial global orientado a las tareas.