Cinématique des particules

La cinématique des particules est l’étude de la trajectoire d’une particule. La position d’une particule est définie comme le vecteur de coordonnées de l’origine d’un cadre de coordonnées à la particule.
Cinématique d’une trajectoire de particules dans un référentiel non tournant
Dans le cas le plus général, un système de coordonnées tridimensionnel est utilisé pour définir la position d’une particule. Cependant, si la particule est contrainte de se déplacer dans une surface, un système de coordonnées bidimensionnel est suffisant. Toutes les observations en physique sont incomplètes sans description de ces observations par rapport à un référentiel.
Le vecteur de position d’une particule est un vecteur tiré de l’origine du cadre de référence vers la particule. Il exprime à la fois la distance du point à l’origine et sa direction à partir de l’origine. En trois dimensions, la position du point P peut être exprimée comme

où
Les cosinus de direction du vecteur de position fournissent une mesure quantitative de la direction. Il est important de noter que le vecteur de position d’une particule n’est pas unique. Le vecteur de position d’une particule donnée est différent par rapport à différents cadres de référence.
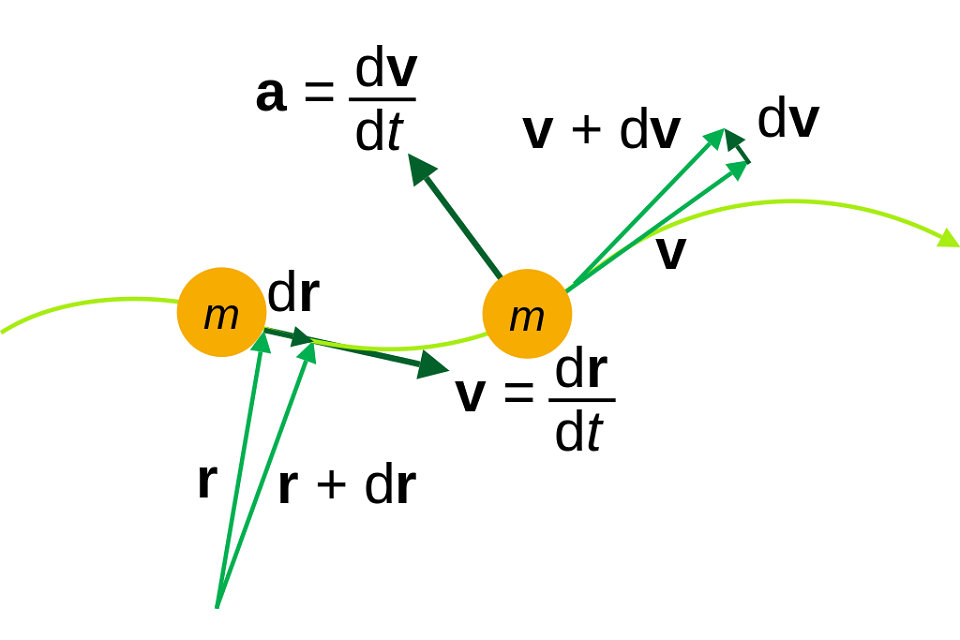
La trajectoire d’une particule est un vecteur fonction du temps,
où les coordonnées xp , yp et zp sont chacune des fonctions du temps.
Vitesse et vitesse
La vitesse d’une particule est une quantité vectorielle qui décrit la direction du mouvement et la magnitude du mouvement de la particule. Plus mathématiquement, le taux de changement du vecteur de position d’un point par rapport au temps est la vitesse du point. Considérons le rapport formé en divisant la différence de deux positions d’une particule par l’intervalle de temps. Ce rapport est appelé la vitesse moyenne sur cet intervalle de temps et est défini comme étant la vitesse = déplacement / temps pris
où ΔP est la modification du vecteur de position sur l’intervalle de temps Δt.
Dans la limite où l’intervalle de temps Δt devient de plus en plus petit, la vitesse moyenne devient la dérivée dans le temps du vecteur de position,
La vitesse d’un objet est la magnitude | V | de sa vitesse. C’est une quantité scalaire:
où s est la longueur de l’arc mesurée le long de la trajectoire de la particule. Cette longueur d’arc parcourue par une particule dans le temps est une quantité non décroissante. Par conséquent, ds / dt est non négatif, ce qui implique que la vitesse est également non négative.
Accélération
Le vecteur de vitesse peut changer de magnitude et de direction ou des deux à la fois. Par conséquent, l’accélération est le taux de changement de l’amplitude du vecteur vitesse plus le taux de changement de direction de ce vecteur. Le même raisonnement utilisé en ce qui concerne la position d’une particule pour définir la vitesse peut être appliqué à la vitesse pour définir l’accélération. L’accélération d’une particule est le vecteur défini par le taux de changement du vecteur vitesse. L’accélération moyenne d’une particule sur un intervalle de temps est définie comme le rapport.
où AV est la différence dans le vecteur vitesse et At est l’intervalle de temps.
L’accélération de la particule est la limite de l’accélération moyenne lorsque l’intervalle de temps s’approche de zéro, ce qui correspond à la dérivée temporelle.
ou
La magnitude de l’accélération d’un objet est la magnitude | A | de son vecteur d’accélération. C’est une quantité scalaire:
Vecteur de position relative
qui est la différence entre les composants de leurs vecteurs de position.
Si le point B a des composants de position
alors la position du point A par rapport au point B est la différence entre leurs composants:
Vitesse relative
La vitesse d’un point par rapport à un autre est simplement la différence entre leurs vitesses
qui est la différence entre les composantes de leurs vitesses.
Si le point A a des composantes de vitesse
et le point B a des composantes de vitesse
alors la vitesse du point A par rapport au point B est la différence entre leurs composantes:
Alternativement, ce même résultat pourrait être obtenu en calculant la dérivée temporelle du vecteur de position relative R B / A.
Dans le cas où la vitesse est proche de la vitesse de la lumière c (généralement à moins de 95%), un autre schéma de vitesse relative appelé rapidité, dépendant du rapport de V à c, est utilisé en relativité restreinte.
Accélération relative
L’accélération d’un point C par rapport à un autre point B est simplement la différence entre leurs accélérations.
qui est la différence entre les composants de leurs accélérations.
Si le point C a des composantes d’accélération
et le point B a des composants d’accélération
alors l’accélération du point C par rapport au point B est la différence entre leurs composantes:
Alternativement, ce même résultat pourrait être obtenu en calculant la deuxième dérivée temporelle du vecteur de position relative P B / A.
Trajectoires de particules en accélération constante
Pour le cas d’accélération constante, l’équation différentielle Eq 1) peut être intégrée car le vecteur d’accélération A d’un point P est constant en amplitude et en direction. On dit qu’un tel point subit un mouvement uniformément accéléré . Dans ce cas, la vitesse V (t) puis la trajectoire P (t) de la particule peuvent être obtenues en intégrant l’équation d’accélération A par rapport au temps.
En supposant que les conditions initiales de la position,
Une seconde intégration donne son chemin (trajectoire),
Des relations supplémentaires entre le déplacement, la vitesse, l’accélération et le temps peuvent être dérivées. Puisque l’accélération est constante,
Une relation entre vitesse, position et accélération sans dépendance temporelle explicite peut être obtenue en résolvant l’accélération moyenne en fonction du temps et en remplaçant et simplifiant
où ∘ désigne le produit scalaire, ce qui est approprié car les produits sont des scalaires plutôt que des vecteurs.
Le point peut être remplacé par le cosinus de l’angle
Dans le cas d’accélération toujours dans la direction du mouvement, l’angle entre les vecteurs (
Ceci peut être simplifié en utilisant la notation pour les grandeurs des vecteurs
Cela réduit les équations paramétriques du mouvement de la particule à une relation cartésienne de la vitesse par rapport à la position. Cette relation est utile lorsque le temps est inconnu. Nous savons aussi que
Trajectoires de particules en coordonnées cylindro-polaires
Il est souvent pratique de formuler la trajectoire d’une particule P (t) = (X (t), Y (t) et Z (t)) à l’aide de coordonnées polaires dans le plan X – Y. Dans ce cas, sa vitesse et son accélération prennent une forme commode.
Rappelons que la trajectoire d’une particule P est définie par son vecteur de coordonnées P mesuré dans un repère fixe F. Lorsque la particule se déplace, son vecteur de coordonnées P (t) trace sa trajectoire, qui est une courbe dans l’espace, donnée par:
où i, j et k sont les vecteurs unitaires le long des axes X, Y et Z de la trame de référence F, respectivement.
Considérons une particule P qui ne se déplace que sur la surface d’un cylindre circulaire R (t) = constante, il est possible d’aligner l’axe Z du cadre fixe F avec l’axe du cylindre. Ensuite, l’angle θ autour de cet axe dans le plan X – Y peut être utilisé pour définir la trajectoire comme suit:
Les coordonnées cylindriques de P (t) peuvent être simplifiées en introduisant les vecteurs unitaires radiaux et tangentiels,
et leurs dérivés temporels du calcul élémentaire:
En utilisant cette notation, P (t) prend la forme,
où R est constant dans le cas d’une particule ne se déplaçant qu’à la surface d’un cylindre de rayon R.
En général, la trajectoire P (t) n’est pas obligée de se situer sur un cylindre circulaire, le rayon R varie avec le temps et la trajectoire de la particule en coordonnées cylindro-polaires devient:
Où R, thêta et Z peuvent être des fonctions du temps continuellement différentiables et la notation de la fonction est supprimée pour des raisons de simplicité. Le vecteur vitesse V P est la dérivée temporelle de la trajectoire P (t), ce qui donne:
De même, l’accélération A P , qui est la dérivée temporelle de la vitesse V P , est donnée par:
Le terme
Rayon constant
Si la trajectoire de la particule est contrainte à se trouver sur un cylindre, le rayon R est constant et les vecteurs vitesse et accélération se simplifient. La vitesse de V P est la dérivée temporelle de la trajectoire P (t),
Le vecteur d’accélération devient:
Trajectoires circulaires planaires
Un cas particulier de trajectoire de particule sur un cylindre circulaire se produit lorsqu’il n’y a pas de mouvement le long de l’axe Z:
où R et Z 0 sont des constantes. Dans ce cas, la vitesse V P est donnée par:
où
est la vitesse angulaire du vecteur unitaire eθ autour de l’axe z du cylindre.
L’accélération A P de la particule P est maintenant donnée par:
Les composants
sont appelées, respectivement, les composantes radiales et tangentielles de l’accélération.
La notation de la vitesse angulaire et de l’accélération angulaire est souvent définie comme suit:
de sorte que les composants d’accélération radiale et tangentielle pour les trajectoires circulaires sont également écrits comme
Trajectoires ponctuelles dans un corps se déplaçant dans l’avion
Représentation matricielle
La combinaison d’une rotation et d’une translation dans le plan R2 peut être représentée par un certain type de matrice 3×3 appelée transformée homogène. La transformée homogène 3×3 est construite à partir d’une matrice de rotation 2×2 A (φ) et du vecteur de traduction 2×1 d = (d x , d y ), ainsi:
Ces transformations homogènes effectuent des transformations rigides sur les points du plan z = 1, c’est-à-dire des points de coordonnées p = (x, y, 1).
En particulier, p définissons les coordonnées des points d’un repère M coïncidant avec un repère fixe F. Ensuite, lorsque l’origine de M est déplacée du vecteur de translation d par rapport à l’origine de F et tournée de l’angle φ par rapport à la En abscisse de F, les nouvelles coordonnées en F des points en M sont données par:
Les transformations homogènes représentent des transformations affines. Cette formulation est nécessaire car une traduction n’est pas une transformation linéaire de R 2 . Cependant, en utilisant la géométrie projective, de sorte que R2 soit considéré comme un sous-ensemble de R3, les translations deviennent des transformations linéaires affines.
Traduction pure
Si un corps rigide se déplace de sorte que son repère M ne tourne pas (∅ = 0) par rapport au repère fixe F, le mouvement est appelé translation pure. Dans ce cas, la trajectoire de chaque point du corps est un décalage de la trajectoire d (t) de l’origine de M, c’est-à-dire:
Ainsi, pour les corps en translation pure, la vitesse et l’accélération de chaque point P du corps sont données par:
où le point désigne la dérivée par rapport au temps et V O et A 0 sont respectivement la vitesse et l’accélération de l’origine du cadre mobile M. Rappelons que le vecteur de coordonnées p dans M est constant, sa dérivée est donc égale à zéro.
Rotation d’un corps autour d’un axe fixe
La cinématique rotationnelle ou angulaire est la description de la rotation d’un objet. La description de la rotation nécessite une méthode pour décrire l’orientation. Les descriptions communes incluent les angles d’Euler et la cinématique des spires induites par les produits algébriques.
Dans ce qui suit, l’attention se limite à une simple rotation autour d’un axe d’orientation fixe. L’axe des z a été choisi pour plus de commodité.
Position
Cela permet de décrire une rotation en tant que position angulaire d’un repère M plan par rapport à un F fixe autour de cet axe z partagé. Les coordonnées p = (x, y) dans M sont liées aux coordonnées P = (X, Y) dans F par l’équation de la matrice:
où
est la matrice de rotation qui définit la position angulaire de M par rapport à F en fonction du temps.
Rapidité
Si le point p ne se déplace pas dans M, sa vitesse dans F est donnée par
Il est commode d’éliminer les coordonnées p et de les écrire en tant qu’opération sur la trajectoire P (t),
où la matrice
est connue sous le nom de matrice de vitesses angulaires de M par rapport à F. Le paramètre ω est la dérivée temporelle de l’angle θ, c’est-à-dire:
Accélération
L’accélération de P (t) dans F est obtenue en tant que dérivée temporelle de la vitesse,
qui devient
où
est la matrice d’accélération angulaire de M sur F, et
La description de la rotation implique alors ces trois quantités:
Position angulaire: la distance orientée d’une origine sélectionnée sur l’axe de rotation à un point d’un objet est un vecteur r (t) localisant le point. Le vecteur r (t) a une projection (ou, de manière équivalente, une composante) r ⊥ (t) sur un plan perpendiculaire à l’axe de rotation. La position angulaire de ce point est alors l’angle θ entre un axe de référence (typiquement l’axe des x positif) et le vecteur r ⊥ (t) dans un sens de rotation connu (typiquement donné par la règle de la main droite).
Vitesse angulaire: la vitesse angulaire est la vitesse à laquelle la position angulaire θ change en fonction du temps t:
La vitesse angulaire est représentée à la figure 1 par un vecteur Ω pointant le long de l’axe de rotation avec une amplitude et un sens déterminés par le sens de rotation donné par la règle de la main droite.
Accélération angulaire: l’amplitude de l’accélération angulaire α est la vitesse à laquelle la vitesse angulaire ω varie en fonction du temps t:
Les équations de la cinématique de translation peuvent facilement être étendues à la cinématique de rotation plane pour une accélération angulaire constante avec des échanges simples variables:
Ici, θ i et θ f sont respectivement les positions angulaires initiale et finale, ω i et ω f sont respectivement les vitesses angulaires initiale et finale et α est l’accélération angulaire constante.Bien que la position dans l’espace et la vitesse dans l’espace soient toutes les deux des vecteurs vrais (en termes de propriétés en rotation), de même que la vitesse angulaire, l’angle en soi n’est pas un vrai vecteur.
Trajectoires ponctuelles dans un corps se déplaçant en trois dimensions
Des formules importantes dans la cinématique définissent la vitesse et l’accélération de points dans un corps en mouvement à mesure qu’ils tracent des trajectoires dans un espace tridimensionnel.Ceci est particulièrement important pour le centre de masse d’un corps, utilisé pour dériver des équations de mouvement à l’aide de la seconde loi de Newton ou des équations de Lagrange.
Position
Afin de définir ces formules, le mouvement d’un composant B d’un système mécanique est défini par l’ensemble des rotations [A (t)] et des translations d (t) assemblés dans la transformation homogène [T (t)] = [A (t), d (t)]. Si p est les coordonnées d’un point P en B mesuré dans le repère mobile M, la trajectoire de ce point tracé en F est donnée par:
Cette notation ne fait pas la distinction entre P = (X, Y, Z, 1) et P = (X, Y, Z), ce qui est, nous l’espérons, clair dans son contexte.
Cette équation pour la trajectoire de P peut être inversée pour calculer le vecteur de coordonnées p dans M comme suit:
Cette expression utilise le fait que la transposée d’une matrice de rotation est aussi son inverse, c’est-à-dire:
Rapidité
La vitesse du point P le long de sa trajectoire P (t) est obtenue en tant que dérivée temporelle de ce vecteur de position,
Le point indique la dérivée par rapport au temps; parce que p est constant, sa dérivée est zéro.
Cette formule peut être modifiée pour obtenir la vitesse de P en opérant sur sa trajectoire P (t) mesurée dans le cadre fixe F. En substituant la transformation inverse de p dans l’équation de vitesse, on obtient:
La matrice [S] est donnée par:
où
est la matrice de vitesse angulaire.
En multipliant par l’opérateur [S], la formule de la vitesse V P prend la forme:
où le vecteur ω est le vecteur vitesse angulaire obtenu à partir des composants de la matrice [Ω]; le vecteur
est la position de P par rapport à l’origine O du cadre mobile M; et
est la vitesse de l’origine O.
Accélération
L’accélération d’un point P dans un corps en mouvement B est obtenue en tant que dérivée temporelle de son vecteur vitesse:
Cette équation peut être développée d’abord en calculant
et
La formule pour l’accélération A P peut maintenant être obtenue comme suit:
ou
où α est le vecteur d’accélération angulaire obtenu à partir de la dérivée de la matrice de vitesse angulaire;
est le vecteur de position relative (la position de P par rapport à l’origine O du cadre en mouvement M); et
est l’accélération de l’origine du cadre en mouvement M.