Un robot médical est un robot utilisé dans les sciences médicales. Ils comprennent des robots chirurgicaux. Ce sont la plupart des télémanipulateurs, qui utilisent les actions du chirurgien d’un côté pour contrôler « l’effecteur » de l’autre.
Les types
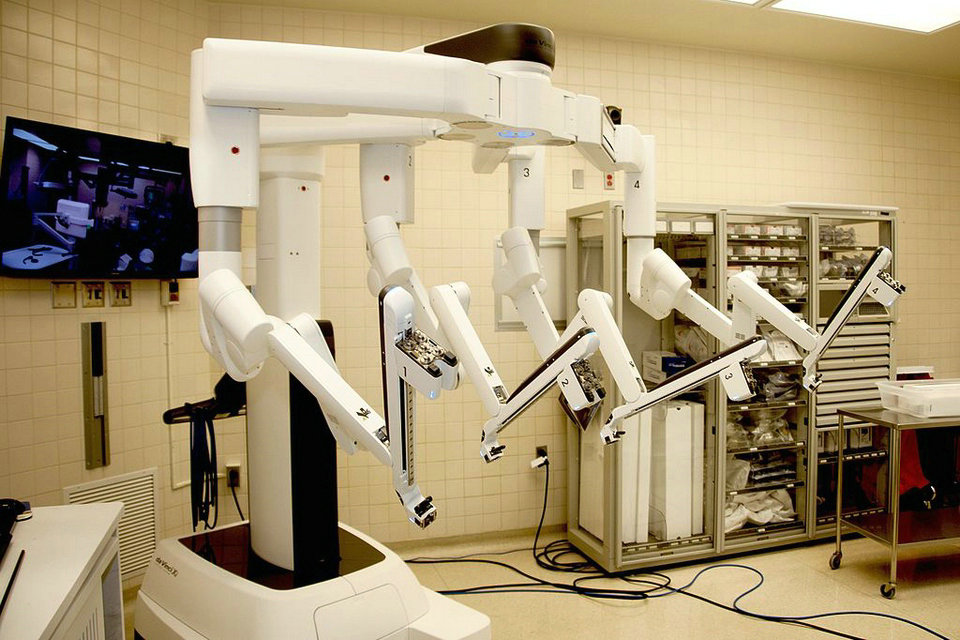
Robots chirurgicaux:
Soit autoriser les interventions chirurgicales avec une plus grande précision qu’un chirurgien humain sans aide, soit autoriser une intervention chirurgicale à distance lorsqu’un chirurgien humain n’est pas physiquement présent avec le patient.
Robots de rééducation:
Faciliter et soutenir la vie des personnes infirmes, âgées ou atteintes d’un dysfonctionnement de certaines parties du corps entraînant des mouvements. Ces robots sont également utilisés pour la rééducation et les procédures associées, telles que la formation et la thérapie.
Biorobots:
Un groupe de robots conçus pour imiter la cognition des humains et des animaux.
Robots de téléprésence:
Permettre aux professionnels médicaux hors site de se déplacer, de regarder, de communiquer et de participer à partir de sites distants.
Automatisation de la pharmacie:
Systèmes robotiques pour distribuer des solides oraux dans une pharmacie de détail ou préparer des adjuvants IV stériles dans une pharmacie d’hôpital.
Robot compagnon:
A la capacité de nouer un dialogue émotionnel avec les utilisateurs, de leur tenir compagnie et de les alerter en cas de problème de santé.
Automatisation de la distribution de médicaments
Un robot qui administre un médicament solide par voie orale ou un robot qui prépare un mélange stérile par voie intraveineuse.
Robot de désinfection:
Capable de désinfecter une pièce entière en quelques minutes à l’aide de la lumière ultraviolette puisée. Ils sont utilisés pour lutter contre la maladie à virus Ebola.
Robot de fauteuil roulant
Avec des capacités de détection et de navigation, à travers des conversations et ensuite vers la destination.
Micro robot médical
Ultra-petite caméra intégrée, peut directement mettre des médicaments dans le corps humain.
L’histoire
Le premier robot chirurgical au monde est l’Arthrobot, développé et utilisé pour la première fois à Vancouver en 1983. L’équipe à l’origine de ce robot était composée du Dr James McEwen, ingénieur biomédical, Geof Auchinleck, étudiant diplômé en génie physique de l’UBC , Le Dr Brian Day, chirurgien et un groupe d’étudiants en génie. Le tout premier robot a été utilisé le 12 mars 1984 lors d’une opération de chirurgie orthopédique à l’hôpital UBC de Vancouver. Plus de 60 chirurgies arthroscopiques ont été effectuées au cours de la première année. En 1985, un documentaire sur les robots industriels de National Geographic, intitulé The Robotics Revolution, a introduit le dispositif.
En plus de cet assistant robot chirurgien qui a donné les instruments chirurgicaux par commande vocale, il peut être mentionné, parmi d’autres dispositifs robotiques développés au même moment, un bras robotique de laboratoire médical.
La société Computer Motion est un pionnier dans le domaine des robots médicaux avec l’AESOP, utilisé au Canada et le ZEUS, utilisé en Europe. En 2003, Intuitive Surgical et Computer Motion fusionnèrent avec le nom Intuitive Surgical. Le ZEUS est alors abandonné au profit du Da Vinci.
Parmi les nouvelles pistes de recherche et développement figurent les nanobots et la robotique douce.
Robots médicaux en cours d’utilisation
De nombreux robots médicaux sont utilisés dans le monde entier. Il existe deux types de robots médicaux.
D’une part, des robots d’intervention, utilisés en chirurgie. Le robot le plus utilisé aujourd’hui dans ce secteur est le robot Da Vinci. Il est utilisé principalement aux États-Unis et en Europe pour diverses interventions chirurgicales mini-invasives dans les cavités abdominales et thoraciques de patients. Son application principale est la chirurgie de la prostate: 60% des opérations de la prostate aux États-Unis ont utilisé un Da Vinci. D’autres systèmes de chirurgie robotique ont vu le jour ces dernières années. Le dispositif ROSA est dédié aux procédures crâniennes mini-invasives, ou Sensei au traitement des troubles du rythme cardiaque. Le Cyberknife est un autre exemple, qui sert à détruire des tumeurs de manière non invasive. Il suit en permanence la localisation de la tumeur et de la cible pendant la procédure. Les robots dits endoscopiques sont utilisés pour assister le chirurgien pendant une opération en tenant la caméra pendant une endoscopie. Des robots comme EndoAssist ou Viky sont utilisés dans les hôpitaux à cette fin. Enfin, certains robots ne sont pas utilisés directement pour assister la procédure chirurgicale elle-même, mais pour des tâches auxiliaires dans la salle d’opération. C’est le cas du système Artis Zeego, qui permet de déplacer le plan d’imagerie d’un système de fluoroscopie en temps réel pendant une opération.
D’autre part, les robots utilisés pour la réadaptation des patients, par exemple après un accident vasculaire cérébral. C’est le cas, par exemple, des systèmes Lokomat et In-Motion, qui assistent le travail de rééducation du patient en fournissant une assistance robotique. De nombreuses recherches sont en cours sur l’utilisation d’exosquelettes en réadaptation, mais celles-ci n’ont pas encore atteint le stade commercial.
Champs d’utilisation
Chirurgie générale
Chirurgie cardiothoracique
électrophysiologie
Gynécologie
Neurochirurgie
Radiologie
Urologie
Limites
L’équipement actuel est très cher. En conséquence, la robotique médicale est très peu utilisée. L’évaluation de l’intérêt d’une chirurgie robotique pour le patient, par rapport à une chirurgie conventionnelle, est limitée et certains posent la question de la qualification des chirurgiens opérant principalement par robot et qui risquent alors de manquer d’expérience lorsqu’une intervention conventionnelle est requise.
En rééducation, divers robots également coûteux sont utilisés. Une étude réalisée en 2018, qui comprenait notamment une comparaison de l’efficacité de la rééducation par robots et de réhabilitations moins sophistiquées, a conclu que la qualité des études sur le terrain est très faible, en dépit d’un investissement public important. Il est donc déraisonnable selon les auteurs d’investir dans ce type d’appareil de rééducation.