सब्सक्रिप्शन आर्किटेक्चर

सब्सक्रिप्शन आर्किटेक्चर एक प्रतिक्रियाशील रोबोट आर्किटेक्चर है जो व्यवहार-आधारित रोबोटिक्स से काफी जुड़ा हुआ है जो 1 9 80 और 9 0 के दशक में बहुत लोकप्रिय था। यह शब्द 1 9 86 में रॉडनी ब्रूक्स और सहयोगियों द्वारा पेश किया गया था। सब्सक्रिप्शन स्वायत्त रोबोटिक्स और रीयल-टाइम एआई में कहीं और व्यापक रूप से प्रभावशाली रहा है।
अवलोकन
सब्सक्रिप्शन आर्किटेक्चर एक नियंत्रण वास्तुकला है जिसे पारंपरिक एआई, या जीओएफएआई के विरोध में प्रस्तावित किया गया था। दुनिया के प्रतीकात्मक मानसिक प्रतिनिधित्व द्वारा व्यवहार का मार्गदर्शन करने के बजाय, सब्सक्रिप्शन आर्किटेक्चर जोड़ों को अंतरंग और नीचे-अप फैशन में क्रिया चयन के लिए संवेदी जानकारी जोड़ता है।
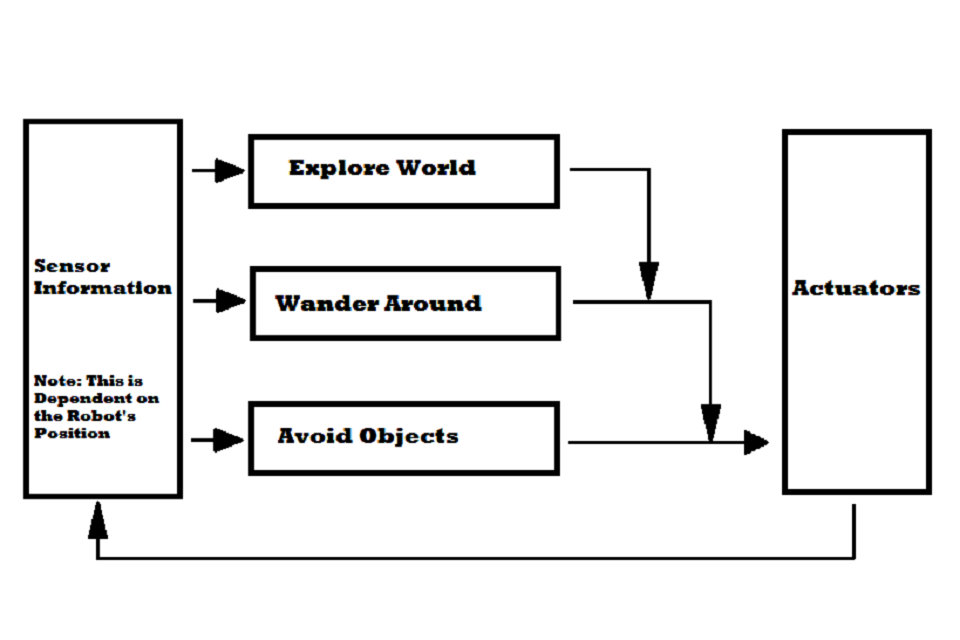
यह उप-व्यवहार में पूर्ण व्यवहार को विघटित करके करता है। ये सब-व्यवहार परतों के पदानुक्रम में व्यवस्थित होते हैं। प्रत्येक परत व्यावहारिक क्षमता के एक विशेष स्तर को लागू करती है, और उच्च स्तर व्यवहार्य व्यवहार बनाने के लिए निम्न स्तर (= एकीकृत स्तर को एक व्यापक व्यापक रूप से एकीकृत / एकीकृत करने) में सक्षम होते हैं। उदाहरण के लिए, रोबोट की सबसे कम परत “ऑब्जेक्ट से बचें” हो सकती है। दूसरी परत “चारों ओर घूमती” होगी, जो तीसरी परत “दुनिया का पता लगाने” के नीचे चलती है। चूंकि एक रोबोट में प्रभावी रूप से “घूमने” के क्रम में “वस्तुओं से बचने” की क्षमता होनी चाहिए, सब्सक्रिप्शन आर्किटेक्चर एक ऐसी प्रणाली बनाता है जिसमें उच्च परत निम्न-स्तरीय दक्षताओं का उपयोग करती है। परतें, जो सभी को सेंसर-सूचना प्राप्त होती है, समानांतर में काम करते हैं और आउटपुट उत्पन्न करते हैं। ये आउटपुट एक्ट्यूएटर, या संकेतों के लिए आदेश हो सकते हैं जो अन्य परतों को दबाने या बाधित करते हैं।
गुण
शारीरिक
एजेंट किसी भी तरह पर्यावरण में अवशोषित होते हैं, उनके शरीर में उनके सेंसर और एक्ट्यूएटर होते हैं, और वे पर्यावरण में बदलावों को समझते हैं और प्रतिक्रिया देते हैं।
परिस्थिति
एजेंट अपने वास्तविक विश्व पर्यावरण का हिस्सा हैं जिनके साथ वे बातचीत करते हैं। यह एजेंट के व्यवहार को प्रभावित करता है।
बुद्धि
एजेंट की खुफिया मुख्य रूप से वास्तविक पर्यावरण, उसकी प्रतिक्रियाओं और उत्तेजना के साथ एजेंट के टकराव द्वारा गठित की जाती है।
उद्भव
पूरी तरह से प्रणाली की खुफिया, एक उभरती हुई तरीके से उत्पन्न होती है, यानी, अपने व्यक्तिगत भागों की बातचीत।
कोई स्पष्ट ज्ञान प्रतिनिधित्व नहीं
सब्सप वास्तुकला में दुनिया का एक स्पष्ट मॉडल नहीं है। इसका मतलब है कि रोबोट के पास आसपास की दुनिया का सरलीकृत अवलोकन नहीं है। लाभ स्पष्ट हैं। एजेंट दुनिया के बारे में भविष्यवाणियां नहीं करते हैं, इसलिए वे एक अप्रत्याशित वातावरण में बहुत अच्छी तरह से काम कर सकते हैं। पढ़ने और लिखने के लिए समय बचाओ। यह इस मॉडल द्वारा उपयोग किए गए एल्गोरिदम का समय भी बचाता है। ऐसे विश्व मॉडल के साथ भी समस्याएं होंगी जिन्हें वास्तविक दुनिया से मेल नहीं करना पड़ेगा। लेकिन इसके नुकसान भी हैं। सिस्टम तब पूरी तरह प्रतिक्रियाशील है। इसका मतलब यह है कि यह केवल दुनिया में क्या हो रहा है इसका जवाब देता है। दूसरे शब्दों में, दुनिया निर्धारित करती है कि वह क्या करना चाहता है।
वितरित किया जा रहा
सीमित ऑटोमाटा के बीच व्यवहार फैलता है जो विभिन्न कार्यों को करता है। नतीजतन, वे पर्यावरण में प्रतिस्पर्धी घटनाओं का जवाब दे सकते हैं। कुल व्यवहार सीमित ऑटोमाटा का अनुमानित योग है। सबसिस्टम आर्किटेक्चर समानांतर और असीमित है क्योंकि परिमित ऑटोमाटा एक-दूसरे से स्वतंत्र रूप से काम करता है। सभी अंतिम मशीन लगातार चल रही हैं, और चूंकि उनके पास अपना समय हो सकता है, उन्हें सिंक्रनाइज़ेशन की आवश्यकता नहीं है।
लेयरिंग
सब्सफेस आर्किटेक्चर में परतें होती हैं जहां प्रत्येक एक निश्चित व्यवहार लागू करता है और इसमें एक या अधिक परिमित ऑटोमाटा होता है। सबसिस्टम आर्किटेक्चर को मॉड्यूलर माना जाता है क्योंकि प्रत्येक परिमित automaton एक स्वतंत्र कार्य करता है। प्रत्येक अंतिम मशीन में कई इनपुट और आउटपुट लाइनें होती हैं। अंतिम मशीन प्रोसेसर हैं जो एक दूसरे को संदेश भेजती हैं और डेटा संरचनाओं को स्टोर करने में सक्षम हैं। प्रोसेसर असीमित रूप से काम करते हैं और समान रूप से पारस्परिक रूप से समकक्ष होते हैं। वे अपने इनपुट की निगरानी करते हैं और आउटपुट को रिपोर्ट भेजते हैं। अंतिम मशीन हमेशा प्राप्त नवीनतम संदेश को ध्यान में रखती है। इस कारण से, अगर पुराने संदेश को संसाधित करने से पहले नया संदेश आता है तो संदेश खो सकता है। परत के भीतर कोई नियंत्रण नहीं है, और प्रोसेसर के बीच संचार का कोई अन्य रूप नहीं है, अर्थात् कोई साझा स्मृति नहीं है। प्रत्येक मॉड्यूल केवल अपने कार्य की परवाह करता है। उच्च परतों में सेंसर तक पहुंच होती है और इनपुट को सीमित करके या निम्न स्तर पर कुछ सीमित ऑटोमाटा के आउटपुट को दबाकर निचली परतों के व्यवहार को प्रभावित करती है।
यह वह तंत्र है जिसके द्वारा उच्च परतों में निचली परतों की भूमिका शामिल होती है।
पथ प्रदर्शन
सब्सक्रिप्शन आर्किटेक्चर के आधार पर सबसे महत्वपूर्ण एजेंट क्षमता दुनिया भर में स्थानांतरित करने और चलती और चलती वस्तुओं से बचने के लिए है। नेविगेशन मुख्य कार्यों में से एक है जिसे एजेंटों को करना है, और यह कार्य बेहद प्रतिक्रियाशील है (अन्य संज्ञानात्मक एजेंटों की तुलना में)। नेविगेशन ज्यादातर परतों में किया जाता है। निम्नतम मॉड्यूल ऑब्जेक्ट से बचाता है (यहां तक कि उन लोगों के लिए भी जो अचानक प्रकट होते हैं) और उच्च स्तर एजेंट को एक निश्चित दिशा में ले जाता है और बाधाओं को अनदेखा करता है। यह संयोजन स्पष्ट मार्ग योजना के बिना ए से बी तक पहुंचने का एक आसान तरीका प्रदान करता है।
अन्य
एजेंट वास्तविक समय में काम करते हैं और मुख्य रूप से वास्तविक, गतिशील और जटिल दुनिया में जाने के लिए डिज़ाइन किए जाते हैं।
उत्पत्ति के कारण
सब्सक्रिप्शन आर्किटेक्चर के निर्माण के कारणों में से एक यह तथ्य था कि लेखक स्वायत्त मोबाइल रोबोटों के निर्माण के लिए निम्नलिखित आवश्यकताओं और आवश्यकताओं से निपटना चाहते थे।
कई लक्ष्य
रोबोट में अधिक लक्ष्य हो सकते हैं जो एक दूसरे के साथ संघर्ष कर रहे हैं और किसी भी तरह से संबोधित करने की आवश्यकता है। उदाहरण के लिए, एक रोबोट उसके सामने एक निश्चित बिंदु तक पहुंचने का प्रयास कर सकता है और साथ ही उसे रास्ते में होने वाली बाधाओं से बचने की जरूरत होती है। इसे कम से कम संभव समय में कुछ जगहों पर भी जाना होगा और साथ ही साथ अपने ऊर्जा संसाधनों को भी बचाया जाना चाहिए। इसलिए यह स्पष्ट है कि उद्देश्यों का महत्व और प्राथमिकता सापेक्ष और प्रासंगिक रूप से निर्भर है। उस समय ट्रैक स्लीपरों की जांच करने से पहले ट्रेन जाने पर ट्रैक को खींचना निश्चित रूप से अधिक महत्वपूर्ण है।
अधिक सेंसर
रोबोट में कई सेंसर हो सकते हैं (कैमरे, इन्फ्रारेड सेंसर, ध्वनिक सेंसर, आदि)। सभी सेंसर संभावित रूप से गलती कर सकते हैं। इसके अतिरिक्त, सेंसर मूल्यों और आवश्यक भौतिक मात्रा के बीच अक्सर कोई प्रत्यक्ष विश्लेषणात्मक संबंध नहीं होता है। कुछ सेंसर उन क्षेत्रों में ओवरलैप कर सकते हैं जिन्हें वे मापते हैं। असंगत रीडिंग अक्सर हो सकती है – कभी-कभी सेंसर विफलता और कभी-कभी माप की स्थिति के कारण – यदि सेंसर का उपयोग इसके दायरे से बाहर किया जाता है। अक्सर, दायरे की सटीक विश्लेषणात्मक विशेषताओं उपलब्ध नहीं हैं। रोबोट उपरोक्त स्थितियों के तहत निर्णय लेने में सक्षम होना चाहिए।
मजबूती
रोबोट मजबूत होना चाहिए। जब कुछ सेंसर विफल हो जाते हैं, तो वे केवल उन लोगों पर भरोसा करने के साथ अनुकूलित और निपटने में सक्षम होना चाहिए जो काम करते हैं। जब पर्यावरण में भारी परिवर्तन होता है, तब भी यह सदमे में या उद्देश्यहीन रूप से और घबराहट से घूमने के बजाए कुछ उचित व्यवहार प्राप्त करने में सक्षम होना चाहिए। यदि यह प्रोसेसर पर त्रुटियां होती है तो यह भी उचित हो सकती है।
अनुमापकता
जब रोबोट में अधिक रोबोट जोड़े जाते हैं, तो उन्हें अधिक प्रसंस्करण क्षमता की आवश्यकता होती है, अन्यथा उनकी मूल क्षमताओं को समय के साथ परेशान किया जा सकता है।
लक्ष्य
सब्सक्रिप्शन आर्किटेक्चर पारंपरिक एआई की तुलना में एक महत्वपूर्ण भिन्न परिप्रेक्ष्य से खुफिया की समस्या पर हमला करता है। रोकी और इसी तरह के सचेत मन प्रतिनिधित्व-प्रेरित परियोजनाओं के प्रदर्शन से निराश, रॉडनी ब्रूक्स ने बेहोशी दिमागी प्रक्रियाओं के समान, बुद्धि की एक अलग धारणा के आधार पर रोबोट बनाने शुरू कर दिए। प्रतीक हेरफेर के माध्यम से मानव खुफिया के पहलुओं को मॉडलिंग करने के बजाय, इस दृष्टिकोण का लक्ष्य गतिशील प्रयोगशाला या कार्यालय पर्यावरण के लिए वास्तविक समय पर बातचीत और व्यवहार्य प्रतिक्रियाओं के लिए है।
लक्ष्य चार प्रमुख विचारों से सूचित किया गया था:
स्थिति – एआई के एक प्रमुख विचार यह है कि एक रोबोट मानव के समान समय-सीमा के भीतर अपने पर्यावरण पर प्रतिक्रिया करने में सक्षम होना चाहिए। ब्रूक्स का तर्क है कि मोबाइल रोबोट स्थित प्रतीकों के आंतरिक सेट के माध्यम से दुनिया का प्रतिनिधित्व नहीं करना चाहिए और फिर इस मॉडल पर कार्य करना चाहिए। इसके बजाए, उनका दावा है कि “दुनिया का अपना सर्वश्रेष्ठ मॉडल” है, जिसका अर्थ यह है कि उचित धारणा-से-एक्शन सेटअप का उपयोग मॉडलिंग के विरोध में दुनिया के साथ सीधे बातचीत करने के लिए किया जा सकता है। फिर भी, प्रत्येक मॉड्यूल / व्यवहार अभी भी दुनिया को मॉडल करता है, लेकिन सेंसरिमोट सिग्नल के करीब, बहुत कम स्तर पर। ये सरल मॉडल आवश्यक रूप से एल्गोरिदम में एन्कोड किए गए विश्व के बारे में हार्डकोडेड धारणाओं का उपयोग करते हैं, लेकिन दुनिया के व्यवहार की भविष्यवाणी करने के लिए स्मृति के उपयोग से बचें, बल्कि जितना संभव हो सके सीधे सेंसरियल प्रतिक्रिया पर भरोसा करते हैं।
अवतार – ब्रूक्स का तर्क है कि एक अवशोषित एजेंट दो चीजें पूरा करता है। पहला यह है कि यह डिजाइनर को एकीकृत भौतिक नियंत्रण प्रणाली का परीक्षण और निर्माण करने के लिए मजबूर करता है, न कि सैद्धांतिक मॉडल या नकली रोबोट जो भौतिक संसार में काम नहीं कर सकता है। दूसरा यह है कि यह प्रतीक ग्राउंडिंग समस्या को हल कर सकता है, एक दार्शनिक मुद्दा कई परंपरागत एआईएस मुठभेड़, अर्थपूर्ण कार्यों को समझने के लिए सीधे डेटा-जोड़कर। “विश्व आधार पर वापसी,” और व्यवहार परतों का आंतरिक संबंध सीधे रोबोट को समझने वाली दुनिया में आधारित है।
खुफिया – विकासवादी प्रगति को देखते हुए, ब्रूक्स का तर्क है कि अवधारणात्मक और गतिशीलता कौशल विकसित करना मानव-जैसी बुद्धि के लिए एक आवश्यक आधार है। इसके अलावा, एआई के लिए व्यवहार्य प्रारंभिक बिंदु के रूप में शीर्ष-नीचे प्रस्तुतिकरणों को अस्वीकार कर, ऐसा लगता है कि “खुफिया दुनिया के साथ बातचीत की गतिशीलता द्वारा निर्धारित की जाती है।”
आपातकाल – परंपरागत रूप से, व्यक्तिगत मॉड्यूल खुद को बुद्धिमान नहीं माना जाता है। यह ऐसे मॉड्यूल की बातचीत है, जो एजेंट और उसके पर्यावरण को देखकर मूल्यांकन किया जाता है, जिसे आमतौर पर बुद्धिमान (या नहीं) समझा जाता है। “खुफिया,” इसलिए, “पर्यवेक्षक की नजर में है।”
उपरोक्त उल्लिखित विचार अभी भी खुफिया प्रकृति और रोबोटिक्स और एआई की प्रगति को बढ़ावा देने के बारे में एक सतत बहस का हिस्सा हैं।
परतें और संवर्धित परिमित-राज्य मशीनें
प्रत्येक परत प्रोसेसर के एक सेट द्वारा बनाई जाती है जो कि परिमित-राज्य मशीनों (एएफएसएम) को बढ़ाया जाता है, संवर्धन को प्रोग्राम करने योग्य डेटा-संरचनाओं को पकड़ने के लिए आवृत्ति चर जोड़ा जा रहा है। एक परत एक मॉड्यूल है और एक व्यवहारिक लक्ष्य के लिए ज़िम्मेदार है, जैसे कि “घूमना”। इन व्यवहारिक मॉड्यूल के भीतर या उसके बीच कोई केंद्रीय नियंत्रण नहीं है। सभी एएफएसएम निरंतर और असीमित रूप से प्रासंगिक सेंसर से इनपुट प्राप्त करते हैं और एक्ट्यूएटर (या अन्य एएफएसएम) को आउटपुट भेजते हैं। इनपुट संकेत जो उस समय तक नहीं पढ़े जाते हैं जब एक नया डिलीवर किया जाता है तो उसे छोड़ दिया जाता है। ये त्याग किए गए सिग्नल आम हैं, और प्रदर्शन के लिए उपयोगी हैं क्योंकि यह सिस्टम को सबसे तात्कालिक जानकारी से निपटकर वास्तविक समय में काम करने की अनुमति देता है।
चूंकि कोई केंद्रीय नियंत्रण नहीं है, इसलिए एएफएसएम एक दूसरे के साथ अवरोध और दमन संकेतों के माध्यम से संवाद करते हैं। अवरोध सिग्नल एक्ट्यूएटर या एएफएसएम तक पहुंचने से सिग्नल ब्लॉक करते हैं, और दमन सिग्नल ब्लॉक या इनपुट को परतों या उनके एएफएसएम में बदल देता है। एएफएसएम संचार की यह प्रणाली यह है कि कैसे उच्च परतें कम होती हैं (आकृति 1 देखें), साथ ही आर्किटेक्चर सामान्य रूप से प्राथमिकता और क्रिया चयन मध्यस्थता से कैसे संबंधित है।
परतों का विकास एक अंतर्ज्ञानी प्रगति का पालन करता है। सबसे पहले सबसे कम परत बनाया, परीक्षण, और डीबग किया गया है। एक बार जब निम्नतम स्तर चल रहा है, तो पहली परत के लिए उचित दमन और अवरोध कनेक्शन के साथ दूसरी परत बनाता है और संलग्न करता है। संयुक्त व्यवहार की जांच और डिबगिंग के बाद, इस प्रक्रिया को सैद्धांतिक रूप से (सैद्धांतिक रूप से) व्यवहार मॉड्यूल के लिए दोहराया जा सकता है .:16-20
लक्षण
उपरोक्त को स्वीकार करते हुए, लेखकों ने उस प्रक्रिया का पालन करने का निर्णय लिया है जो सब्सक्रिप्शन आर्किटेक्चर के आधार का निर्माण करता है। उन्होंने आंतरिक रोबोट ऑपरेशन की बजाय नियंत्रण प्रणाली के वांछित बाहरी अभिव्यक्तियों के आधार पर रोबोट को लंबवत बनाने की समस्या का सामना किया। फिर उन्होंने तथाकथित योग्यता स्तर को परिभाषित किया। योग्यता स्तर उन सभी वातावरणों के संबंध में रोबोट व्यवहार के आवश्यक स्तर का विनिर्देश है जिसमें यह चल रहा है। एक उच्च स्तर की क्षमता का मतलब व्यवहार का एक और विशिष्ट स्तर है। क्षमता स्तर का मुख्य विचार यह है कि नियंत्रण प्रणाली की परतें बनाना संभव है जो किसी दिए गए स्तर के अनुरूप हैं और बस मौजूदा सेट में एक नई परत जोड़ना संभव है।
आर ब्रूक्स और उनकी टीम ने 1 9 86 में क्षमता के निम्नलिखित स्तरों को परिभाषित किया:
वस्तुओं के संपर्क से बचें (कोई फर्क नहीं पड़ता कि वे चल रहे हैं या स्थिर हैं)
1. वस्तुओं के साथ संघर्ष के बिना उद्देश्यहीन जगाओ
2. पहुंच के भीतर स्थानों की खोज करके दुनिया का अन्वेषण करें
3. पर्यावरण का नक्शा बनाएं और अपनी यात्रा को एक स्थान से दूसरे स्थान पर बनाएं
4. स्थिर वातावरण में रिकॉर्ड परिवर्तन
5. पहचान योग्य वस्तुओं के मामले में दुनिया पर विचार करें और इन वस्तुओं से जुड़े कार्यों को निष्पादित करें
6. उन योजनाओं को तैयार और कार्यान्वित करें जिनके लिए एक वांछनीय तरीके से दुनिया की स्थिति में बदलाव की आवश्यकता है
7. दुनिया में वस्तुओं के व्यवहार पर विचार करें और तदनुसार संशोधित करें
लेखकों ने पहले एक पूर्ण रोबोट नियंत्रण प्रणाली बनाई जो शून्य स्तर की दक्षताओं को प्राप्त करता है और पूरी तरह से जांच की जाती है। एक और परत नियंत्रण प्रणाली के पहले स्तर का नाम दिया। यह सिस्टम की शून्य परत से डेटा को संभालने में सक्षम है, और इसे शून्य-स्तर के आंतरिक इंटरफेस में डेटा डालने की भी अनुमति है, जो सामान्य बिटरेट को सीमित करता है। सिद्धांत यह है कि शून्य परत चलती रहती है और कभी-कभी परत पथ के बारे में कुछ भी नहीं जानता है, कभी-कभी डेटा पथों में हस्तक्षेप करता है। यह परत शून्य परत की मदद से पहली स्तर की दक्षताओं तक पहुंचने में सक्षम है। उच्च स्तर की योग्यता प्राप्त करने के लिए एक ही प्रक्रिया को दोहराया जाता है। आंकड़ा 3 देखें। इस समय पहली परत बनाई गई थी, नियंत्रण प्रणाली का एक कार्यशील हिस्सा पहले से ही उपलब्ध है। अतिरिक्त परतों को बाद में जोड़ा जा सकता है और सिस्टम को बदला नहीं जा सकता है।
कई लक्ष्य
व्यक्तिगत परत व्यक्तिगत लक्ष्यों पर एक साथ काम कर सकते हैं। दमन तंत्र तब उन कार्यों को मध्यस्थ करता है जिन्हें ध्यान में रखा जाता है। इसका फायदा यह है कि कौन सा लक्ष्य लेने का कोई पूर्व निर्णय नहीं हो सकता है।
एकाधिक सेंसर
सभी सेंसर केंद्रीय प्रतिनिधित्व का हिस्सा नहीं हो सकते हैं। केंद्रीय प्रतिनिधित्व में केवल एक सेंसर रीडआउट जोड़ा जा सकता है, जिसे अत्यंत विश्वसनीय के रूप में पहचाना जाता है। उसी समय, हालांकि, सेंसर मूल्य रोबोट द्वारा उपयोग किया जा सकता है। अन्य परतें अलग-अलग परतों के साथ निपटाए जाने के बावजूद, अपने लक्ष्यों को प्राप्त करने के लिए परिणामों को संसाधित और उपयोग कर सकती हैं।
मजबूती
कई सेंसर का अस्तित्व स्पष्ट रूप से सिस्टम की मजबूती में जोड़ता है जब उनके परिणाम उचित रूप से उपयोग किए जा सकते हैं। सब्सक्रिप्शन आर्किटेक्चर में मजबूती का एक और स्रोत है। निचले परतों को अच्छी तरह से साबित किया गया है, भले ही उच्च परत जोड़े गए हों। चूंकि एक उच्च परत केवल वैकल्पिक डेटा के साथ सक्रिय रूप से हस्तक्षेप करके निम्न परत आउटपुट को दबा सकती है, और ऐसे मामलों में जहां यह उचित तरीके से परिणाम नहीं दे सकती है, निचले स्तर अभी भी परिणाम के परिणाम प्रदान करेंगे जो कि योग्यता के निचले स्तर पर भी उचित हैं।
तानाना
स्केलेबिलिटी से निपटने का एक स्पष्ट तरीका यह है कि प्रत्येक नई परत अपने प्रोसेसर पर चलने दें।
रोबोट
निम्नलिखित रोबोट की एक छोटी सूची है जो सबसमशन आर्किटेक्चर का उपयोग करती है।
एलन (रोबोट)
हर्बर्ट, एक सोडा रोबोट एकत्र कर सकता है
जेनघिस, एक मजबूत हेक्सापोडल वॉकर
उपरोक्त वर्णों में अन्य रोबोटों के साथ विस्तार से वर्णन किया गया है शतरंज नहीं खेलें।
शक्तियां और कमजोरियां
वास्तुकला के मुख्य फायदे हैं:
अपने लक्षित डोमेन में रीयल-टाइम सिस्टम के पुनरावृत्ति विकास और परीक्षण पर जोर;
सीमित, कार्य-विशिष्ट धारणा को सीधे कनेक्ट किए गए कार्यों को जोड़ने पर जोर देने की आवश्यकता है; तथा
वितरक और समांतर नियंत्रण पर जोर, जिससे जानवरों के समान तरीके से धारणा, नियंत्रण और क्रिया प्रणाली को एकीकृत किया जाता है।
वास्तुकला के मुख्य नुकसान हैं:
अवरोध और दमन की अत्यधिक वितरित प्रणाली के माध्यम से अनुकूलनीय क्रिया चयन को डिजाइन करने में कठिनाई;: 13 9 -140 और
बड़ी स्मृति और प्रतीकात्मक प्रतिनिधित्व की कमी, जो वास्तुकला को भाषा समझने से रोकती है;
जब सब्सक्रिप्शन आर्किटेक्चर विकसित किया गया था, उपन्यास वास्तुकला के उपन्यास सेटअप और दृष्टिकोण ने इसे कई महत्वपूर्ण डोमेनों में सफल होने की अनुमति दी, जहां पारंपरिक एआई विफल रहा, अर्थात् गतिशील वातावरण के साथ वास्तविक समय पर बातचीत। हालांकि, बड़ी मेमोरी स्टोरेज, प्रतीकात्मक प्रतिनिधित्व, और केंद्रीय नियंत्रण की कमी, जटिल कार्यों को सीखने, गहराई से मैपिंग और समझने की भाषा सीखने में नुकसान पहुंचाती है।
एक्सटेंशन
1 9 8 9 में, ब्रूक्स ने मुख्य रूप से इनपुट सीमा के क्षेत्र में और सीमित ऑटोमाटा द्वारा आउटपुट को दबाकर सब्सक्रिप्शन आर्किटेक्चर विकसित किया। 1 99 1 में ब्रूक्स हार्मोनल प्रणाली के कार्यान्वयन के साथ आए। व्यक्तिगत परतों को हार्मोन की उपस्थिति या अनुपस्थिति से दबाया या सीमित किया जाना चाहिए। 1 99 2 में मातरिक व्यवहार के आधार पर वास्तुकला के विचार के साथ आता है। इस वास्तुकला को मजबूती और प्रतिक्रियाशीलता खोए बिना दुनिया के स्पष्ट प्रतिनिधित्व की कमी को संबोधित करना चाहिए।