現在、モバイルマニピュレータは、モバイルプラットフォームに搭載されたロボットマニピュレータアームから構築されたロボットシステムを指す用語として普及しています。 このようなシステムは、モバイルプラットフォームとロボットマニピュレータアームとの利点を組み合わせ、それらの欠点を低減する。 例えば、可動プラットフォームはアームの作業領域を拡張するが、アームはいくつかの操作機能を提供する。
説明
モバイルマニピュレーションシステムは、モバイルプラットフォームによって提供されるモビリティとマニピュレータによって提供される器用さという2つの利点を提供します。 モバイルプラットフォームはマニピュレータに無限のワークスペースを提供します。 モバイルプラットフォームの余分な自由度は、ユーザーにさらに多くの選択肢を提供します。 しかし、そのようなシステムの動作は、多くの自由度とそれが実行する非構造化環境のために困難です。
一般的なシステム構成:
モバイルプラットフォーム
ロボットマニピュレータ
ビジョン
ツーリング
動機
現時点では、移動操作は開発および研究環境における主な焦点の対象であり、自律移動または遠隔操作のいずれかの移動マニピュレータは、宇宙探査、軍事操作、在宅ケアおよびヘルスケアなどの多くの分野で使用されている。 しかし、産業分野では、インテリジェントでフレキシブルな自動化のニーズは存在しますが、モバイルマニピュレータの実装は限られていました。 さらに、必要なテクノロジエンティティ(モバイルプラットフォーム、ロボットマニピュレータ、ビジョンおよびツーリング)は、大部分が市販のコンポーネントで利用できます。
その理由は、製造業が伝統的に行動しているため、新技術を導入してリスクを取ることに抵抗がないからです。 また、産業用移動操作の分野では、個々の技術、特にロボットマニピュレータやツーリングの最適化が注目されていますが、統合、使用、適用は無視されています。 これは、実稼働環境でのモバイルロボットの実装がほとんど報告されていないことを意味します。
コンポーネント
モバイルロボットプラットフォーム
モバイルベースとして、古典的なドライバーレス輸送システムとモバイルロボットの両方が使用されています。 移動ロボットの使用には、自由に自律的に室内をナビゲートすることができるという利点があります。そのため、問題が発生した場合のマニピュレータ(到達不可能、キネマティックからの現在位置の操作、パーツの位置の変更機械加工されるなど)は、固定位置にのみ移送する代わりに、直接的に支持することができる。 プラットフォームの操作性は非常に重要です。 FTSとは対照的に、移動ロボットはいつでも動的に割り当てられた位置にアプローチすることができます。しかし、古典的な微分運動学は、特にワークステーションのすぐ近くでは限界に達しており、多かれ少なかれ複雑な操作でしかロボットを動かすことはできません。 そのため、全方位ドライブがますます普及しています。
ストレージオプション
移動マニピュレータがオブジェクトを効率的に輸送する場合でも、適切な保管設備を備えていなければならない。 これらは、適切な設計で、第2のアームを使用することなく、ハンドルの変更を可能にするために使用することもできる。 (例えば、閉鎖時に箱から引き出されたビール瓶は、注ぐことができる前に、身体に止めて把持しなければならない)。 より大きなストレージオプションは、原則としてロボットの作業をより効率的にしますが、車両をナビゲートするのをより困難にします。
マニピュレータアーム
これは産業用ロボットと特別に開発されたロボットアームの両方になります。 現在市販されている小型軽量のロボットアームを選択することで、自己開発アームの使用が大幅に減少しました。 (参照:フレキシブルマニピュレータアーム)
グリッパー
エンドエフェクタは、操作するアイテムに合わせて選択する必要があります。 複数の動く指を持つ擬人化グリッパーはますます利用可能になり、主に研究に使用されています。
画像処理
ロボットが作業環境で部品を操作する場合、画像処理システムがほとんど常に必要です。 固定された腕の動きのみが行われる場合、訓練中に使用される現在の位置とプラットホームの位置との間のオフセットが少なくとも決定され、考慮されなければならない。 人間の作業者の任務を引き継ぐためには、ロボットは多かれ少なかれ不規則な部分(ボックス内のハンドルとも呼ばれます)または可変の格納場所に対処しなければなりません。
調整制御
移動ロボットおよびロボットアームの個々の制御は数十年にわたって使用されており、よく開発されている。 しかし、両方のシステムを組み合わせると、非常に多数の可能性のあるエラーと問題が発生し、追加の調整コントロールを追加する必要があります。 とりわけ、注文された操作が実行できない場合、これは独立して解決策を見つけるはずですが、別のポーズから行うことも可能です。システム全体をクローズド・キネマティック・チェーンとして制御することは有益です。これは、冗長度が高いためにインプリメンテーションで実装するのが非常に困難です。
セキュリティシステム
原則として、固定マニピュレータアームや通常の自律車両に使用される安全装置を、可動マニピュレータにも使用することができます。 しかしながら、移動マニピュレータが人または少なくとも他の車両と作業領域を共有する場合、多くの可能性のある危険な状況が発生するため、セキュリティシステムは全く新しくかつ非常に要求の厳しい要求を受ける。
長所と短所
ロボットの可動プラットフォームとロボットアームを組み合わせると、得られる長所と短所はそれぞれの部品の合計よりも大きくなります。
利点:
機能の範囲と可能なアプリケーションは飛躍的なものです。
ロボットシステム全体は、サポートシステム(ローディング/アンローディングステーション、マテリアルハンドリング装置、転送装置など)からはるかに独立し、少なくとも理論的には安くなります。
モバイルマニピュレータは、以前は人間によってのみ実行可能であったより複雑な身体活動を自動化することも可能にし、運動のために健康問題を引き起こすことが多い。
全体的なシステムは、オブジェクトに直接アクセスできない場合にアームの基部を追跡するなど、不正確さや偏差にさらに柔軟に対応することができます。
不利益:
両方のコンポーネントの要件のため、これらはしばしば互いに干渉します。
アームは効率的に作業するためには大きな安定ベースを必要としますが、効率的にナビゲートするには、プラットフォームは小さくて軽くなければなりません。
プラットフォームのサイクル時間が短いほど、駆動が速くなり、目標位置の精度が低下します。 より正確ではないが、アームの開始位置が分かっているほど、必要な修正のサイクル時間に起因する時間が長くなる。
バッテリ駆動のプラットフォームの寿命を延ばすには、総重量と消費電力を最小限に抑える必要があります。 しかし、ロボットアームはより効率的に動作し、組み合わせる機能(したがって通常は追加のコンポーネント)も多くなります。
アームの作業環境が絶えず変化していること、以前に使用された多くの補助構造(アームの定義された端部位置に対する部品の供給、コンポーネントの交換位置の変更、定義された照明など)はもはや、つかいます。
さらに、多くのモバイルマニピュレータは、変化の速いタスクに使用するのに十分柔軟ではありません。 これは、中小企業でも広く普及するための最大の阻害要因の1つです。
人々と対話するときには、まったく新しい危険な状況が発生し、安全技術への要求が高まり、技術的に実現可能なソリューションと比較して強制力のあるソリューションの割合が厳しく制限されます。
現在のところ、このタイプのロボットには完全に準拠した基準、ガイドライン、または設計提案がないため、怪我や損傷の法的影響を予測することが困難です。
オプションの数が増えると、特に自律的なエラー処理に関して、システム全体の制御に対する要求が不釣り合いに高くなります。 これにより、マシンのダウンタイムのリスクも増加します。
適用分野
モバイルマニピュレータの応用分野は多様であり、現在は完全には予測できません。 いくつかの既知のアプリケーションは次のとおりです。
宅配サービス
ビールゲテンの広範な応用に主導されているのは主に、サービスロボット工学の分野における研究プロジェクトであり、好ましくはデモンストレーションのためのタスクであり、民間世帯にも発生し、メディアにも有効である。 これらの課題における科学的課題は、通常、予想される経済的利益よりもかなり高い。
ケア
高齢者と扶養家族の割合が増加するにつれて、看護師の必要性も高まります。 2050年までに、ケアを必要とする人々の割合は、雇用者数に比べて3倍になると予想されます。 したがって、日本を中心とした様々な研究プロジェクトにおいて、ロボットのケアに尽力しました。
ピッキング
開発中のプロジェクトは、重くて扱いにくいコンポーネントのピッキングにモバイルマニピュレータを使用するために現在進行中です。 高いフォローアップコストを引き起こす可能性のある間違いが防止されています。 さらに、人間の労働者は長期的に不健全な仕事から解放され、労働人口の平均年齢が増加するほど関連性が高まります。
タイムライン
| 年 | ロボット名 | 会社/研究所 |
|---|---|---|
| 1996年 | ヒラレ2世 | LAAS-CNRS、フランス |
| 2000年 | Jaume | Jaume I University、Robotic Intelligence Lab、スペイン、スペイン |
| 2004年 | FAuStO | ヴェローナ大学(イタリア) |
| 2006年 | Neobotix MM-500 | Neobotix GmbH、ドイツ |
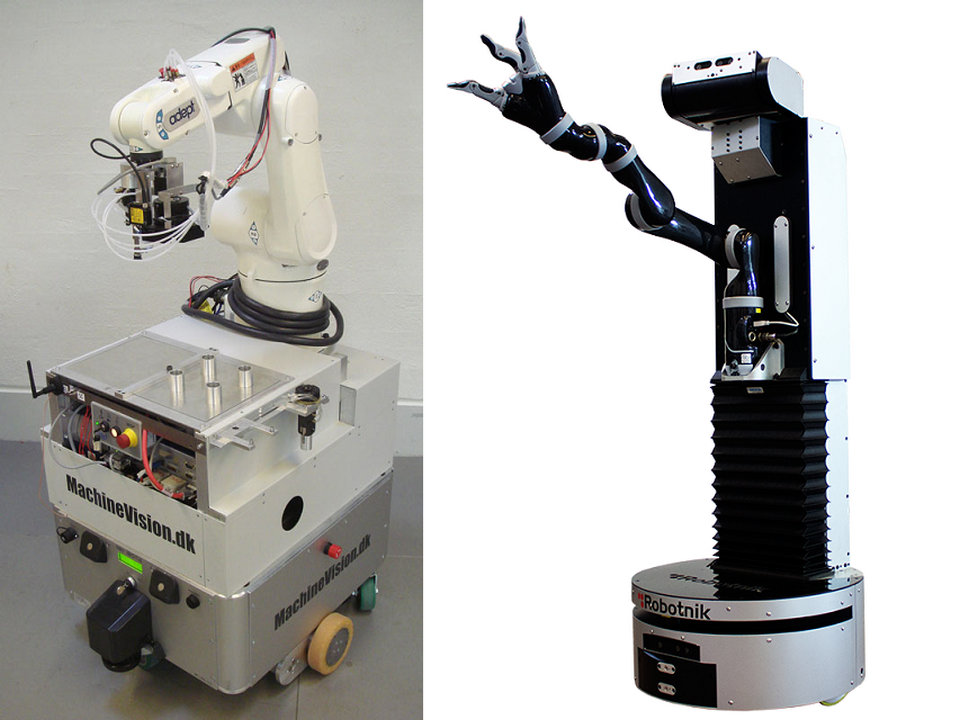
| 2009年 | リトルヘルパー | デンマークのアルボルグ大学生産部門 |
| 2012年 | G-WAM | Robotnik Automation&Barrett Technologies、スペイン&米国 |
| 2013年 | UBR-1 | 無制限ロボティクス、アメリカ合衆国 |
| 2013年 | X-WAM | Robotnik Automation&Barrett Technologies、スペイン&米国 |
| 2015年 | CARLoS | AIMEN、スペイン |
| 2015年 | RB-1 | Robotnik Automation&Kinova Robotics、スペイン&カナダ |
最先端
最近の例の1つは、オールボルグ大学の生産部門のモバイルマニピュレータ「Little Helper」です。