Originally posted 2018-11-15 09:17:51.
계층 적 제어 시스템은 일련의 장치와 관리 소프트웨어가 계층 트리에 배열 된 제어 시스템의 한 형태입니다. 트리 내의 링크가 컴퓨터 네트워크에 의해 구현 될 때, 그 계층 제어 시스템은 또한 네트워크 제어 시스템의 한 형태이다.
개요
복잡한 행동을하는 사람이 만든 시스템은 종종 계층 구조로 구성됩니다. 예를 들어, 명령 계층 구조에는 상위, 하위 및 조직 의사 소통의 조직도가 있습니다. 계층 적 제어 시스템은 의사 결정 책임을 나누기 위해 마찬가지로 구성됩니다.
계층의 각 요소는 트리의 링크 된 노드입니다. 달성해야 할 명령, 작업 및 목표는 상위 노드에서 하위 노드로 트리를 이동하는 반면 센세이션 및 명령 결과는 트리에서 하위 노드로 상위 노드로 이동합니다. 노드는 형제와 메시지를 교환 할 수도 있습니다. 계층 적 제어 시스템의 두 가지 특징은 계층과 관련되어 있습니다.
트리의 각 상위 계층은 즉시 하위 계층보다 긴 계획 및 실행 시간 간격으로 작동합니다.
하위 계층은 로컬 작업, 목표 및 감각을 가지며 일반적으로 자신의 결정보다 우선하지 않는 상위 계층에서 활동을 계획하고 조정합니다. 계층은 하이브리드 지능형 시스템을 구성하며이 계층에서 가장 반응이 적은 계층은 하위 기호입니다. 시간 제약이 완화 된 상위 계층은 추상적 인 세계 모델 및 계획 수행으로부터 추론 할 수 있습니다. 계층 적 작업 네트워크는 계층 적 제어 시스템에서 계획하기에 적합합니다.
인공 시스템 외에도 동물의 제어 시스템이 계층 구조로 구성되도록 제안됩니다. 유기체의 행동이 그것의 인식을 제어하는 수단이라고 가정하는 지각 제어 이론에서, 유기체의 제어 시스템은 지각이 구성 될 때 계층 적 패턴으로 조직되도록 제안된다.
제어 시스템 구조
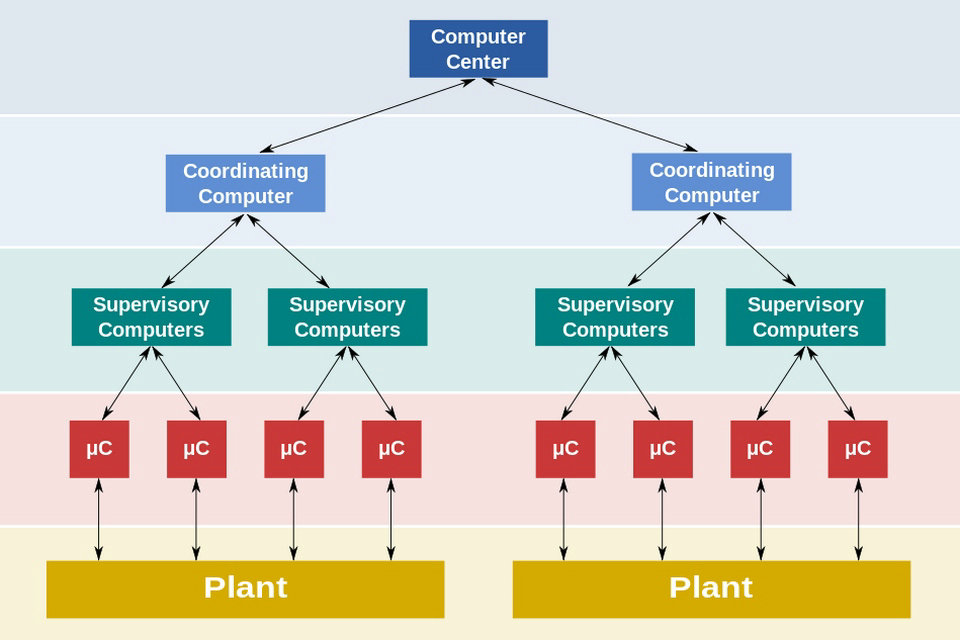
첨부 된 다이어그램은 산업 제어 시스템의 컴퓨터 제어를 사용하여 기능적 제조 수준을 보여주는 일반적인 계층 적 모델입니다.
다이어그램을 참조하십시오.
레벨 0은 유량 및 온도 센서와 같은 필드 장치 및 제어 밸브와 같은 최종 제어 요소를 포함합니다.
수준 1에는 산업화 된 입출력 (I / O) 모듈과 관련 분산 전자 프로세서가 포함되어 있습니다.
수준 2에는 시스템의 프로세서 노드에서 정보를 대조하고 운영자 제어 화면을 제공하는 감독 컴퓨터가 포함됩니다.
수준 3은 프로세스를 직접 제어하지 않지만 생산 모니터링 및 모니터링 대상과 관련된 생산 관리 수준입니다.
수준 4는 생산 일정 수준입니다.
응용 프로그램
제조, 로봇 및 차량
로봇 패러다임 중 하나는 로봇이 하향식으로 작동하고, 계획을 세우는 데 중점을두고, 특히 동작 계획을 세우는 계층 적 패러다임입니다. 컴퓨터를 이용한 생산 공학은 1980 년대부터 NIST에서 연구 중심으로 진행되어 왔습니다. 자동화 된 제조 연구 시설은 5 층 생산 관리 모델을 개발하는 데 사용되었습니다. 1990 년대 초반 DARPA는 군사 명령 및 제어 시스템과 같은 애플리케이션을위한 분산 (즉, 네트워크화 된) 지능형 제어 시스템을 개발하기위한 연구를 후원했습니다. NIST는 RCS (Real-Time Control System) 및 실시간 제어 시스템 소프트웨어를 개발하기위한 이전 연구를 기반으로 제조 셀, 로봇 크레인 및 자동화 된 차량을 작동시키는 데 사용되는 일반 계층 제어 시스템입니다.
2007 년 11 월, DARPA는 Urban Challenge를 개최했습니다. 수상작 인 Tartan Racing은 계층 적 임무 계획, 모션 계획, 행동 생성, 지각, 세계 모델링 및 메카트로닉스 등의 계층 적 제어 시스템을 사용했습니다.
인공 지능
소집 아키텍처는 행동 기반 로봇과 관련이있는 인공 지능을 개발하기위한 방법론입니다. 이 아키텍처는 복잡한 지능형 동작을 여러 “단순한”동작 모듈로 분해하여 계층으로 구성하는 방법입니다. 각 계층은 소프트웨어 에이전트 (즉, 시스템 전체)의 특정 목표를 구현하고 상위 계층은 점차 추상적입니다. 각 레이어의 목표는 하위 레이어의 목표를 포함합니다. 먹는 음식 층에 의해 앞으로 나아 가기로 한 결정은 가장 낮은 장애물 회피 계층의 결정을 고려합니다. 행동은 상위 계층에 의해 계획 될 필요는 없으며, 오히려 행동은 감각 입력에 의해 유발 될 수 있으므로 적절한 경우에만 활성화됩니다.
강화 학습은 각 노드가 경험을 통해 행동을 개선하는 방법을 배울 수있는 계층 적 제어 시스템에서 동작을 획득하는 데 사용되었습니다.
James Albus는 NIST에서 RCS에서 영감을 얻은 계층 적 제어 시스템 인 Reference Model Architecture (RMA)라는 지능형 시스템 설계 이론을 개발했습니다. Albus는 각 노드가 이러한 구성 요소를 포함하도록 정의합니다.
동작 생성은 상급 상위 노드에서받은 작업을 실행합니다. 또한 하위 노드를 계획하고 하위 노드에 태스크를 발급합니다.
감각 지각 (sensory perception)은 종속 노드들로부터 센세이션을 수신 한 다음, 그들을 그룹화하고, 필터링하고, 그렇지 않으면 처리하여 로컬 상태를 업데이트하고 상위 노드에 전송되는 감각을 형성하는 더 높은 레벨의 추상화에 책임진다.
가치 판단은 업데이트 된 상황을 평가하고 대체 계획을 평가할 책임이 있습니다.
World Model은 종속 노드의 추상화 수준에서 제어되는 시스템, 제어 된 프로세스 또는 환경에 대한 모델을 제공하는 로컬 상태입니다.
최저 수준에서 RMA는 세계 모델을 제어 된 프로세스 또는 실제 세계에 직접 매핑하여 수학 추상화의 필요성을 피하고 시간 제약 반응식 계획을 구현할 수있는 포함 구조로 구현할 수 있습니다 유한 상태 기계로. 그러나 RMA의 높은 수준에는 자동화 된 계획 및 일정 계획에 의해 구현 된 정교한 수학적 세계 모델 및 동작이있을 수 있습니다. 계획은 현재의 감각으로 인해 특정 동작이 트리거 될 수 없을 때 필요합니다. 예측되거나 예상되는 감각, 특히 노드의 동작 결과로 발생하는 감각으로 인해 발생합니다.