Um sistema de controle hierárquico é uma forma de sistema de controle no qual um conjunto de dispositivos e software governante é organizado em uma árvore hierárquica. Quando os links na árvore são implementados por uma rede de computadores, esse sistema de controle hierárquico também é uma forma de sistema de controle em rede.
visão global
Um sistema construído pelo homem com comportamento complexo é frequentemente organizado como uma hierarquia. Por exemplo, uma hierarquia de comando tem entre suas características notáveis o organograma de superiores, subordinados e linhas de comunicação organizacional. Sistemas de controle hierárquico são organizados de forma semelhante para dividir a responsabilidade de tomada de decisão.
Cada elemento da hierarquia é um nó vinculado na árvore. Comandos, tarefas e objetivos a serem alcançados fluem pela árvore de nós superiores para nós subordinados, enquanto sensações e resultados de comando fluem da árvore de nós subordinados para nós superiores. Os nós também podem trocar mensagens com seus irmãos. As duas características distintivas de um sistema de controle hierárquico estão relacionadas às suas camadas.
Cada camada superior da árvore opera com um intervalo maior de planejamento e tempo de execução do que sua camada imediatamente inferior.
As camadas inferiores têm tarefas, objetivos e sensações locais, e suas atividades são planejadas e coordenadas por camadas superiores que geralmente não substituem suas decisões. As camadas formam um sistema inteligente híbrido no qual as camadas reativas mais baixas são sub-simbólicas. As camadas mais altas, tendo restrições de tempo relaxadas, são capazes de raciocinar a partir de um modelo de mundo abstrato e executar o planejamento. Uma rede hierárquica de tarefas é uma boa opção para o planejamento em um sistema de controle hierárquico.
Além dos sistemas artificiais, propõe-se que os sistemas de controle de um animal sejam organizados como uma hierarquia. Na teoria do controle perceptivo, que postula que o comportamento de um organismo é um meio de controlar suas percepções, sugere-se que os sistemas de controle do organismo sejam organizados em um padrão hierárquico à medida que suas percepções são construídas.
Estrutura do sistema de controle
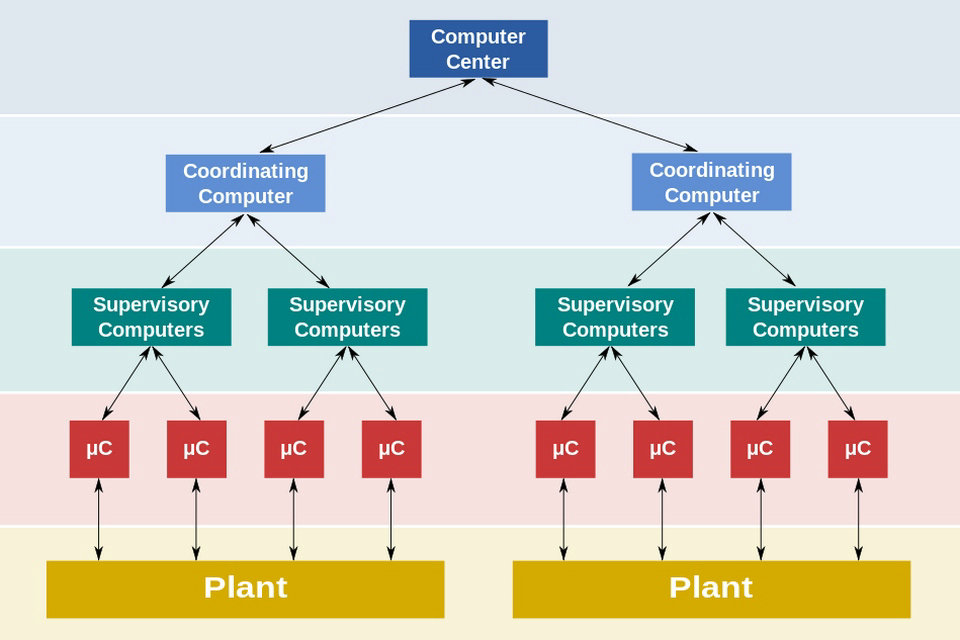
O diagrama em anexo é um modelo hierárquico geral que mostra os níveis de fabricação funcional usando o controle computadorizado de um sistema de controle industrial.
Referindo-se ao diagrama;
O nível 0 contém os dispositivos de campo, como sensores de fluxo e temperatura, e elementos de controle final, como válvulas de controle
O nível 1 contém os módulos de Entrada / Saída (E / S) industrializados e seus processadores eletrônicos distribuídos associados.
O nível 2 contém os computadores de supervisão, que agrupam informações dos nós do processador no sistema e fornecem as telas de controle do operador.
O nível 3 é o nível de controle de produção, que não controla diretamente o processo, mas se preocupa em monitorar metas de produção e monitoramento
O nível 4 é o nível de programação de produção.
Aplicações
Fabricação, robótica e veículos
Entre os paradigmas robóticos está o paradigma hierárquico em que um robô opera de maneira descendente, pesado no planejamento, especialmente no planejamento de movimentos. Engenharia de produção auxiliada por computador tem sido um foco de pesquisa no NIST desde a década de 1980. Sua Automated Manufacturing Research Facility foi usada para desenvolver um modelo de controle de produção de cinco camadas. No início dos anos 90, a DARPA patrocinou pesquisas para desenvolver sistemas de controle inteligentes distribuídos (ou seja, em rede) para aplicações como sistemas de comando e controle militares. O NIST baseou-se em pesquisas anteriores para desenvolver seu Sistema de Controle em Tempo Real (RCS) e Software de Sistema de Controle em Tempo Real, que é um sistema de controle hierárquico genérico usado para operar uma célula de manufatura, um guindaste robótico e um veículo automatizado.
Em novembro de 2007, a DARPA realizou o Desafio Urbano. O vencedor do concurso, Tartan Racing empregou um sistema de controle hierárquico, com planejamento de missão em camadas, planejamento de movimento, geração de comportamento, percepção, modelagem mundial e mecatrônica.
Inteligência artificial
A arquitetura de subsunção é uma metodologia para o desenvolvimento de inteligência artificial fortemente associada à robótica baseada em comportamento. Essa arquitetura é uma maneira de decompor o comportamento inteligente complicado em muitos módulos de comportamento “simples”, que por sua vez são organizados em camadas. Cada camada implementa um objetivo específico do agente de software (ou seja, o sistema como um todo) e as camadas superiores são cada vez mais abstratas. O objetivo de cada camada é o mesmo das camadas subjacentes, por exemplo, a decisão de avançar pela camada de comida para consumo leva em conta a decisão da menor camada de impedimento de obstáculos. O comportamento não precisa ser planejado por uma camada superior, mas os comportamentos podem ser desencadeados por entradas sensoriais e, portanto, são apenas ativos sob circunstâncias em que podem ser apropriados.
Aprendizado por reforço tem sido usado para adquirir comportamento em um sistema de controle hierárquico, no qual cada nó pode aprender a melhorar seu comportamento com experiência.
James Albus, enquanto no NIST, desenvolveu uma teoria para design de sistemas inteligentes chamada Reference Model Architecture (RMA), que é um sistema de controle hierárquico inspirado no RCS. Albus define cada nó para conter esses componentes.
A geração de comportamento é responsável pela execução de tarefas recebidas do nó pai superior. Também planeja e emite tarefas para os nós subordinados.
A percepção sensorial é responsável por receber sensações dos nós subordinados, agrupando, filtrando e processando-os em abstrações de nível superior que atualizam o estado local e que formam sensações que são enviadas para o nó superior.
O juízo de valor é responsável por avaliar a situação atualizada e avaliar os planos alternativos.
O Modelo Mundial é o estado local que fornece um modelo para o sistema controlado, processo controlado ou ambiente no nível de abstração dos nós subordinados.
Em seus níveis mais baixos, o RMA pode ser implementado como uma arquitetura de subsunção, na qual o modelo mundial é mapeado diretamente ao processo controlado ou ao mundo real, evitando a necessidade de abstração matemática e no qual o planejamento reativo limitado pelo tempo pode ser implementado como uma máquina de estados finitos. Níveis mais altos de RMA, no entanto, podem ter modelos matemáticos sofisticados e comportamentos implementados por planejamento e planejamento automatizados. O planejamento é necessário quando certos comportamentos não podem ser acionados por sensações atuais, mas sim por sensações previstas ou previstas, especialmente aquelas que surgem como resultado das ações do nó.