Robôs com pernas são um tipo de robô móvel que usa membros mecânicos para o movimento. Eles são mais versáteis do que robôs com rodas e podem atravessar muitos terrenos diferentes, embora essas vantagens exijam maior complexidade e consumo de energia. Os robôs com pernas geralmente imitam animais de perna, como humanos ou insetos, em um exemplo de biomimética.
Tipos
Os robôs com pernas podem ser categorizados pelo número de membros que usam, o que determina as marchas disponíveis. Robôs com muitas pernas tendem a ser mais estáveis, enquanto que menos pernas proporcionam maior manobrabilidade.
De uma perna
Os robôs de uma perna ou de pula-pula usam um movimento de salto para navegação. Nos anos 80, a Universidade Carnegie Mellon desenvolveu um robô de uma perna para estudar o equilíbrio. O SALTO de Berkeley é outro exemplo.
De duas pernas
Robôs bípedes ou de duas pernas exibem movimento bípede. Como tal, eles enfrentam dois problemas principais:
controle de estabilidade, que se refere ao equilíbrio de um robô, e
controle de movimento, que se refere à capacidade de um robô se mover.
O controle da estabilidade é particularmente difícil para os sistemas bípedes, que devem manter o equilíbrio na direção para frente e para trás, mesmo em repouso. Alguns robôs, especialmente brinquedos, resolvem este problema com pés grandes, que proporcionam maior estabilidade e reduzem a mobilidade. Alternativamente, sistemas mais avançados usam sensores como acelerômetros ou giroscópios para fornecer feedback dinâmico de uma forma que se aproxima do equilíbrio de um ser humano. Tais sensores também são empregados para controle de movimento e caminhada. A complexidade dessas tarefas se presta ao aprendizado de máquina.
O movimento bipedal simples pode ser aproximado por um polígono rolante, onde o comprimento de cada lado corresponde ao de uma única etapa. À medida que o comprimento do passo se torna mais curto, o número de lados aumenta e o movimento se aproxima de um círculo. Isso conecta o movimento bipedal ao movimento das rodas como limite do comprimento da passada.
Robôs de duas pernas incluem:
Atlas da Boston Dynamics
Robôs de brinquedo, como QRIO e ASIMO.
O robô Valkyrie da NASA, destinado a ajudar humanos em Marte.
O ping-pong jogando robô TOPIO.
De quatro patas
Robôs quadrúpedes ou de quatro patas exibem movimento de quadrupedal. Eles se beneficiam do aumento da estabilidade sobre os robôs bípedes, especialmente durante o movimento. Em baixa velocidade, um robô quadrúpede pode mover apenas uma perna de cada vez, garantindo um tripé estável. Os robôs de quatro patas também se beneficiam de um centro de gravidade mais baixo do que os sistemas de duas pernas.
Robôs de quatro patas incluem:
A série TITAN, desenvolvida desde os anos 80 pelo Laboratório Hirose-Yoneda.
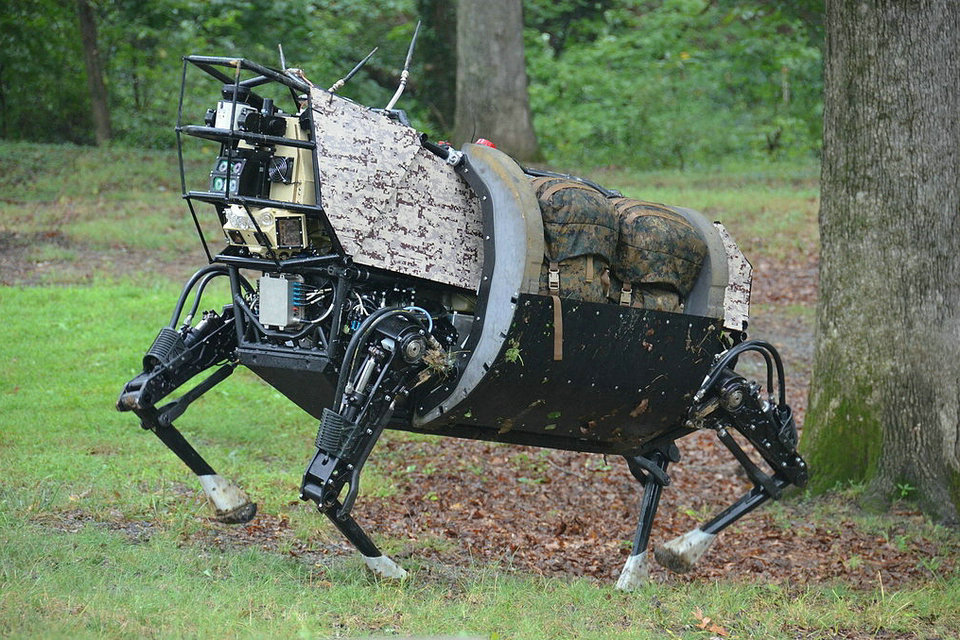
O BigDog dinamicamente estável, desenvolvido em 2005 pela Boston Dynamics, pelo Jet Propulsion Laboratory da NASA e pela Estação de Campo Concord da Universidade de Harvard.
Sucessor do BigDog, o LS3.
Seis patas
Os robôs de seis patas, ou hexapods, são motivados por um desejo de estabilidade ainda maior do que os robôs bípedes ou quadrúpedes. Seus projetos finais muitas vezes imitam a mecânica dos insetos, e seus passos podem ser categorizados de forma semelhante. Esses incluem:
Marcha das ondas: a marcha mais lenta, na qual os pares de pernas se movem em uma “onda” das costas para a frente.
Tripé: um passo ligeiramente mais rápido, no qual três pernas se movem de uma só vez. As três pernas restantes fornecem um tripé estável para o robô.
Robôs de seis pernas incluem:
Odex, um hexapod de 375 libras desenvolvido pela Odetics na década de 1980. A Odex se destacou com seus computadores de bordo, que controlavam cada perna.
Gêngis, um dos primeiros robôs autônomos de seis patas, foi desenvolvido no MIT por Rodney Brooks na década de 1980.
A série moderna de brinquedos, Hexbug.
Oito patas
Os robôs com pernas de oito pernas são inspirados por aranhas e outros aracnídeos, bem como por alguns caminhantes submarinos. Eles oferecem, de longe, a maior estabilidade, o que permitiu alguns sucessos iniciais com robôs legged.
Os robôs de oito pernas incluem:
Dante, um projeto da Carnegie Mellon University projetado para explorar o Monte Erebus.
O T8X, um robô disponível comercialmente projetado para emular a aparência e os movimentos de uma aranha.
Híbridos
Alguns robôs usam uma combinação de pernas e rodas. Isso garante à máquina a velocidade e eficiência energética da locomoção com rodas, bem como a mobilidade da navegação de pernas. O Boston Dynamics ‘Handle, um robô bípede com rodas em ambas as pernas, é um exemplo.
Comportamento de andar
Caminhada estática
A marcha estática é quando o centro de gravidade de um robô está acima dos pés o tempo todo, de modo que não pode cair sem a ação de uma força externa.
Caminhada dinâmica e corrida
A marcha dinâmica é quando o centro de gravidade de um robô também pode estar fora da área dos pés sem que o robô caia. De fato, poder-se-ia falar de uma “queda controlada”, pois o robô cairia em uma parada repentina de seu movimento.
A caminhada dinâmica ocorre quando o movimento necessário para manter a velocidade resulta em um momento em que nenhuma perna do robô está tocando o solo.
Robôs móveis estáticos
O robô ambulante clássico consiste em atuadores, sensores e um controle de computador. As “pernas” são geralmente movidas por servomotores de modo que um programa de movimento predeterminado seja desenrolado.
Robô de caminhar estático de duas pernas
O robô ASIMO se move com uma velocidade máxima de 6 km / h, com um tamanho de 1,30 me um peso de 52 kg e requer muita energia elétrica. Uma habilidade especial dele é que ele pode subir escadas.
Robô ambulante de seis patas
As construções de seis pernas são uma base ideal para robôs andando estáveis estaticamente. Eles são, portanto, adequados para o movimento em terrenos irregulares. Existem dois passos (sequência de movimentos das pernas):
Curso de tripé
Transição Tetrapod
O trem de tripé tem três pernas no chão a qualquer momento (exemplo: inseto indiano, com 3 posições e 3 pernas oscilantes).
A marcha do tetrápode sempre tem quatro pernas no solo (4 pernas, 2 pernas oscilantes).
No caso de polainas com seis pernas ortogonais, uma diferenciação também é feita de acordo com o princípio do movimento das pernas à parte da sequência dos movimentos das pernas:
Seguidores (siga o líder) (por exemplo, engrenagem de tripé, engrenagem de tetrápode)
Andador Circular
Corredor da Web (andador de tecelagem)
Criaturas de seis patas correm como seguidores. Uma perna segue (em qualquer ordem) a outra. Máquinas podem fazer mais. No corredor circular, as três pernas do lado direito têm um eixo de rotação comum – como as mãos de um relógio (correspondente às pernas esquerdas). A perna mais recuada é balançada na frente da perna anterior. Mas como é a última perna para passar as outras duas pernas? Ele simplesmente oscila sob a barriga (a plataforma do robô).
O web runner também realiza um movimento biologicamente impossível. No corredor da Web, todas as seis pernas estão em um eixo vertical comum no centro da plataforma. Cada perna pode andar completamente ao redor de todo o corpo (um movimento telescópico horizontal torna isso possível). As pernas movem-se da sua posição mais recuada para a posição mais frontal, correndo em volta das outras duas pernas do lado de fora.
Ao caminhar em terrenos irregulares, é crucial que o robô encontre um ponto seguro de aterrissagem dentro do seu tamanho de degrau (área de seleção de posição) sem ter que se desviar muito de sua direção principal.
Robô de passeio dinâmico
Corredores dinâmicos passivos
Robôs em movimento que podem se mover sem fonte de energia são baseados em um brinquedo inventado há 150 anos. Ele só tinha que ser acionado e então poderia correr sozinho por uma pequena encosta. Para fazer isso, o brinquedo balança da direita para a esquerda e balança a perna um pouco para frente. Então balança da esquerda para a direita e a outra pula para a frente.
Com esta construção, o brinquedo pode mover-se com eficiência energética e servir como um modelo inicial para robôs de corrida tecnicamente avançados. Nos anos 80, Tad McGeer usou o princípio do pêndulo para estabilizar os movimentos, o que foi realizado neste brinquedo. Não mais um sistema de controle complexo e lento em um computador preso deve trazer o robô para o trabalho, mas a estrutura do sistema músculo-esquelético deve estabilizar o robô em execução sem ação adicional. Se a construção do brinquedo simples é complementada com um “quadril” ou “pés móveis”, então esses robôs só precisam de energia quando aceleram as massas em movimento e não mais como nos robôs que rodam anteriormente também ao frear.