A otimização de topologia (TO) é um método matemático que otimiza o layout do material dentro de um determinado espaço de projeto, para um determinado conjunto de cargas, condições de contorno e restrições com o objetivo de maximizar o desempenho do sistema. TO é diferente da otimização de formas e otimização de dimensionamento no sentido de que o design pode atingir qualquer forma dentro do espaço de design, em vez de lidar com configurações predefinidas.
A formulação convencional de TO usa um método de elementos finitos [FEM] para avaliar o desempenho do projeto. O design é otimizado usando técnicas de programação matemática baseadas em gradiente, como o algoritmo de critérios de otimalidade e o método de movimentação de assíntotas ou algoritmos não baseados em gradientes, como algoritmos genéticos.
A otimização de topologia tem uma ampla gama de aplicações em engenharia aeroespacial, mecânica, bioquímica e civil. Atualmente, os engenheiros usam TO principalmente no nível conceitual de um processo de design. Devido às formas livres que ocorrem naturalmente, o resultado é muitas vezes difícil de fabricar. Por essa razão, o resultado emergente da TO é muitas vezes ajustado para a manufaturabilidade. Adicionar restrições à formulação para aumentar a capacidade de fabricação é um campo ativo de pesquisa. Em alguns casos, os resultados de TO podem ser diretamente fabricados usando manufatura aditiva; TO é, portanto, uma parte fundamental do projeto para a manufatura aditiva.
História
Este método derivado da matemática foi claramente definido, explicado e tornado utilizável para a mecânica nos anos 2000, notavelmente com o artigo fundador de Ole Sigmund.
O software de otimização topológica cada vez mais sofisticado permite aos engenheiros salvar o material possível para um objeto enquanto mantém ou melhora sua força ou flexibilidade (se necessário) e levando em conta as restrições que serão impostas. tentativa e erro e / ou o gênio de criadores e / ou engenheiros de fabricação.
Um exemplo muito simples é a redução otimizada do número de raios de uma roda de bicicleta. Até agora, apenas os formulários simples estavam em causa, porque estes softwares são muito gulosos no cálculo ou foram rapidamente limitados pela complexidade do trabalho solicitado
Em outubro de 2017, na revista Nature, pesquisadores de uma universidade dinamarquesa apresentam um método para fazer este trabalho para objetos grandes, melhorando a resolução possível (uma imagem 2d é composta de pixels enquanto uma imagem 3D é composta de voxels. Até recentemente, a resolução de modelos 3D otimizados foi limitada a 5 milhões de voxels, mas um novo programa otimiza objetos de até 1 bilhão de voxels, o que permite modelar e redesenhar otimizando uma asa de Boeing 777 mais leve em 5% enquanto é reforçada por dentro por nervuras longitudinais e diagonais curvas em vez de em uma grade … com uma economia esperada de 200 toneladas de querosene / ano, o que exigiu dias de computação por um supercomputador e esse design (que evoca o interior de alguns ossos ou partes internas de exoesqueletos de insetos) é atualmente “incontrolável”, mas o progresso da impressão 3D pode em breve colocá-lo ao nosso alcance.
Declaração do problema
Um problema de otimização de topologia pode ser escrito na forma geral de um problema de otimização como:

A declaração do problema inclui o seguinte:
Uma função objetiva . Essa função representa a quantidade que está sendo minimizada para melhor desempenho. A função objetivo mais comum é a conformidade, em que a minimização da conformidade leva à maximização da rigidez de uma estrutura.
 . Essa função representa a quantidade que está sendo minimizada para melhor desempenho. A função objetivo mais comum é a conformidade, em que a minimização da conformidade leva à maximização da rigidez de uma estrutura.
. Essa função representa a quantidade que está sendo minimizada para melhor desempenho. A função objetivo mais comum é a conformidade, em que a minimização da conformidade leva à maximização da rigidez de uma estrutura.A distribuição de material como uma variável de problema. Isso é descrito pela densidade do material em cada local . O material está presente, indicado por um 1, ou ausente, indicado por um 0.
 . O material está presente, indicado por um 1, ou ausente, indicado por um 0.
. O material está presente, indicado por um 1, ou ausente, indicado por um 0.O espaço de design . Isso indica o volume permitido dentro do qual o design pode existir.Requisitos de montagem e embalagem, acessibilidade humana e de ferramentas são alguns dos fatores que precisam ser considerados na identificação desse espaço. Com a definição do espaço de design, regiões ou componentes no modelo que não podem ser modificados durante o curso da otimização são considerados como regiões sem design.
 . Isso indica o volume permitido dentro do qual o design pode existir.Requisitos de montagem e embalagem, acessibilidade humana e de ferramentas são alguns dos fatores que precisam ser considerados na identificação desse espaço. Com a definição do espaço de design, regiões ou componentes no modelo que não podem ser modificados durante o curso da otimização são considerados como regiões sem design.
. Isso indica o volume permitido dentro do qual o design pode existir.Requisitos de montagem e embalagem, acessibilidade humana e de ferramentas são alguns dos fatores que precisam ser considerados na identificação desse espaço. Com a definição do espaço de design, regiões ou componentes no modelo que não podem ser modificados durante o curso da otimização são considerados como regiões sem design.constrangimentos uma característica que a solução deve satisfazer.Exemplos são a quantidade máxima de material a ser distribuído (restrição de volume) ou valores máximos de tensão.
 constrangimentos
constrangimentos  uma característica que a solução deve satisfazer.Exemplos são a quantidade máxima de material a ser distribuído (restrição de volume) ou valores máximos de tensão.
uma característica que a solução deve satisfazer.Exemplos são a quantidade máxima de material a ser distribuído (restrição de volume) ou valores máximos de tensão. geralmente inclui resolver uma equação diferencial. Isso é mais comumente feito usando o método dos elementos finitos, uma vez que essas equações não possuem uma solução analítica conhecida.
geralmente inclui resolver uma equação diferencial. Isso é mais comumente feito usando o método dos elementos finitos, uma vez que essas equações não possuem uma solução analítica conhecida.Metodologias de Implementação
Existem várias metodologias de implementação que foram usadas para resolver problemas de TO.Na mecânica, resolver um problema de otimização topológica envolve modelar a peça, ou o conjunto de partes, a ser otimizado usando o método de elementos finitos. Um método clássico de otimização topológica consiste em considerar em cada ponto do volume de otimização uma densidade de matéria. variando entre 0 e 1. Outros métodos consideram a orientação local do material (para materiais não-isotrópicos) ou mesmo de outras características. Nesses métodos, a otimização geralmente envolve minimizar a energia de deformação da estrutura, o que equivale a aproximadamente encontrar a estrutura mais rígida possível. Podemos definir a quantidade de material usada para destacar os formulários ideais, orientar um projeto e otimização feita de outra forma ou procurar diretamente definir um formulário minimizando o material a ser implementado para minimizar a estrutura máxima, respeitando uma restrição que não deve exceder. Na prática, e limiar, em particular, para impor restrições geométricas específicas relacionadas com o processo de fabricação (simetrias, autorização de volume oco ou não, …, plano comum).
Os principais passos e dificuldades a serem superados são geralmente os seguintes:
Defina as especificações da peça para projetar:
Espaço realmente disponível: geralmente é muito maior do que a sala possivelmente existente, e pode ser ainda mais ampliado colocando-se de volta a função realmente preenchida e as restrições que cercam essa sala, ou o conjunto de salas para redesenhar. Não podemos esquecer as áreas onde o material é imposto ou proibido (por razões funcionais ou estéticas).
Conexões mecânicas com o meio ambiente: é necessário colocar as conexões planas possíveis com as partes vizinhas, porque muitas vezes há muito mais liberdade para as zonas de fixação do que as previstas a priori. Algumas vezes não está claro quais áreas bloquear ou quais zonas são carregadas por forças, sendo a mais pragmática imaginar como a peça poderia ser testada em uma bancada de testes, com links fixos e conectores, por exemplo.
Forças mecânicas sofridas: é necessário levar em conta todas as cargas mecânicas vistas pela peça, além da função principal, ou seja. esforços relacionados a etapas de fabricação (incluindo usinagem), esforços relacionados ao manuseio da peça de trabalho (montagem / desmontagem da peça de trabalho, transporte), esforços acidentais (choques), por exemplo.
Simetrias e condições de fabricação (esta sendo cada vez mais levada em conta pelo software de computador).
Iniciar o cálculo de otimização topológica: a finura da malha deve ser adaptada à precisão espacial desejada e aos recursos computacionais disponíveis; os cálculos podem ser longos, por isso tentamos fazer os primeiros cálculos na escala de alguns minutos e depois refiná-los. Também é necessário verificar como os diferentes casos de carregamento pelo algoritmo são levados em consideração. De fato, se alguém apenas procura a estrutura mais rígida possível para uma dada massa, as energias das diferentes cargas são simplesmente somadas, então é necessário pesá-las juntas, possivelmente. Por outro lado, se o objetivo é obter a peça mais leve possível que não quebra, não há necessidade de ponderação.
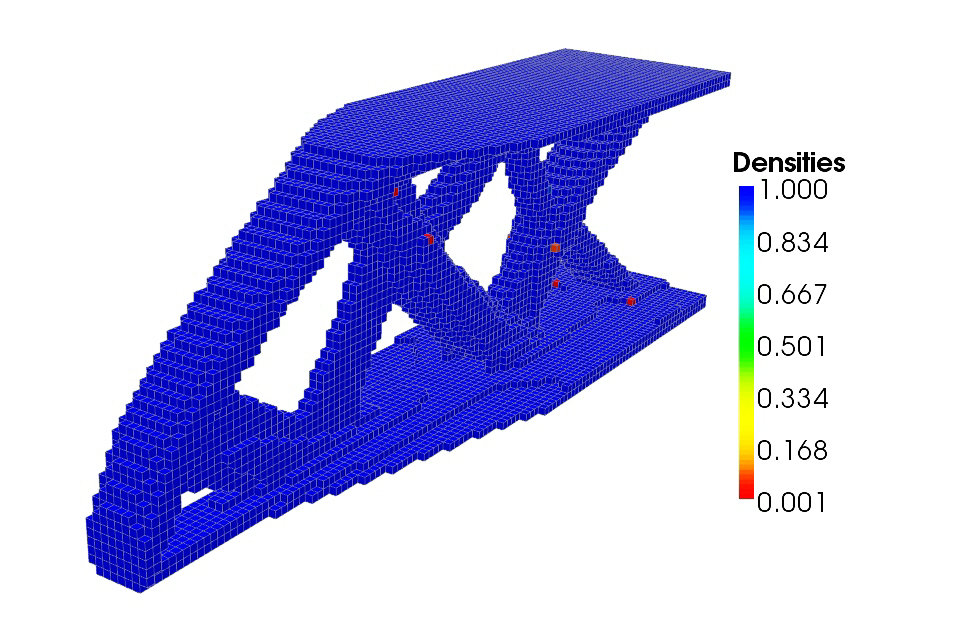
Análise do resultado: Para mostrar uma parte facilmente compreensível (com vácuo e plenitude bem definidos), o resultado é normalmente filtrado pelo software para exibição (por exemplo, cheio corresponde a áreas de densidade do material maiores que 50%, caso contrário está vazio). É necessário, portanto, levar em conta que, em geral, é uma matéria mais ou menos densa / porosa que é realmente considerada pelo algoritmo, e que as possíveis zonas de matéria não relacionadas ao resto são perfeitamente possíveis, ao mesmo tempo. exibir, porque eles estão ligados ao resto por material de baixa densidade, não exibido. O resultado é, portanto, pretender definir uma peça feita de vazia e cheia, mais próxima do que o algoritmo propõe.
Existem parâmetros (às vezes ocultos) para explorar essas sutilezas em detalhes: limite do material (padrão 50% em geral), penalização (parâmetro limitando as zonas de densidade em torno de 50%, mas que pode degradar a convergência dos algoritmos), filtragem / suavização (filtro que permite eliminar detalhes considerados pequenos demais) e, claro, a finura da malha (que permite revelar detalhes mais ou menos finos). Muitas vezes é percebido neste estágio que a forma obtida é absurda, geralmente seguindo a omissão de uma restrição maior, ou porque o problema foi mal colocado (por exemplo, se não há conexões suficientes para manter a sala ou porque os bloqueios são insuficientes) ou esforços foram aplicados a uma área onde o material é proibido). mas pode degradar a convergência dos algoritmos), filtragem / suavização (filtro que permite eliminar detalhes considerados pequenos demais) e, claro, a finura da malha (que torna possível revelar detalhes mais ou menos finos).
Muitas vezes é percebido neste estágio que a forma obtida é absurda, geralmente seguindo a omissão de uma restrição maior, ou porque o problema foi mal colocado (por exemplo, se não há conexões suficientes para manter a sala ou porque os bloqueios são insuficientes) ou esforços foram aplicados a uma área onde o material é proibido). mas pode degradar a convergência dos algoritmos), filtragem / suavização (filtro que permite eliminar detalhes considerados pequenos demais) e, claro, a finura da malha (que torna possível revelar detalhes mais ou menos finos).Muitas vezes é percebido neste estágio que a forma obtida é absurda, geralmente seguindo a omissão de uma restrição maior, ou porque o problema foi mal colocado (por exemplo, se não há conexões suficientes para manter a sala ou porque os bloqueios são insuficientes) ou esforços foram aplicados a uma área onde o material é proibido).
Desenho e verificação: uma vez consolidada a interpretação dos resultados, a peça pode ser desenhada o mais próximo possível da topologia obtida (número de barras / chapas, orientação, espessuras relativas), mas possivelmente mais agradável ao olho, pois As chamadas formas “orgânicas”, obtidas por otimização topológica, nem sempre são adequadas. É por isso que às vezes impomos uma pele fora da sala (a parte visível) limitando a otimização topológica apenas dentro da sala a ser iluminada (parte invisível). Se possível, é melhor usar treliças (ou seja, uma rede apertada de vigas ou paredes, como espumas), a fim de colocar material de densidade intermediária onde o cálculo faz parecer (c ‘
Otimização de topologia contínua e discreta
Pode-se distinguir na otimização de topologia contínua e discreta. Na otimização de topologia contínua, busca-se a distribuição de material no espaço de instalação. Na otimização de topologia discreta, elementos discretos são procurados como cobertura do espaço de construção. Por exemplo, uma estrutura ótima pode ser pesquisada, o que, em última análise, representa uma topologia do objeto geral.
Otimização de Topologia Contínua
Na prática, a otimização de topologia é usada no processo de design para obter propostas para projetos iniciais de componentes. Ao fazer isso, o designer deve primeiro determinar o espaço máximo disponível e as condições de contorno (cargas e restrições). Esses dados são convertidos em um modelo FE (FE = elementos finitos).
Basicamente, uma distinção é feita de acordo com a otimização de topologia material e geométrica.Na otimização da topologia geométrica, a geometria do componente é descrita pela forma do limite externo, ou seja, as arestas e superfícies. Isto também recessos são feitos dentro do limite do componente e variados em forma. A otimização de topologia de material descreve a geometria de uma peça no espaço de design. Aqui, cada elemento finito no espaço de design recebe uma densidade. Para algoritmos de otimização simples, como os critérios de otimalidade (por exemplo, design totalmente estressado), a densidade é definida como 0 ou 100% como uma simples chave liga / desliga. O projeto totalmente estressado retém os elementos que são tensionados perto da tensão máxima permitida, de modo que, no final da otimização, quase todos os elementos da malha FE são totalmente explorados em termos de resistência. A programação matemática é um algoritmo de otimização que usa as derivadas parciais da função objetivo para determinar a mudança dos parâmetros individuais para a próxima iteração. Consequentemente, deve haver uma distribuição de densidade contínua para diferenciação. No chamado método Homogenisierungs, a mudança na densidade é descrita por um corpo oco microscópico em cada um dos elementos finitos e depois transferida através de uma lei material não-linear, macroscópica, em uma mudança no módulo de elasticidade. Como resultado, as tensões e deformações do componente podem ser calculadas.Como resultado dessa otimização de topologia, você obtém um modelo de design robusto e poroso, que só oferece ajuda para encontrar uma forma devido à estrutura semelhante a um osso e à negligência das restrições de fabricação. Uma maneira de melhorar o resultado é retornar o modelo FE para um modelo de superfície do OneCAD suavizado. Se necessário, restrições de fabricação também podem ser levadas em conta.
Otimização de topologia discreta
Uma das primeiras otimizações de topologia foi feita por Anthony George Maldon Michell. Mas até hoje as otimizações de topologia são realizadas por treliças. A razão para isso é o baixo tempo de computação; embora a proximidade com a realidade seja significativamente mais remota do que no caso da otimização de topologia contínua.
Resolver problemas TO em um sentido discreto é feito através da discretização do domínio do design em elementos finitos. As densidades de material dentro desses elementos são então tratadas como as variáveis do problema. Neste caso, a densidade de material de um indica a presença de material, enquanto zero indica uma ausência de material. Devido à complexidade topológica atingível do desenho ser dependente da quantidade de elementos, uma grande quantidade é preferida. Grande quantidade de elementos finitos aumenta a complexidade topológica atingível, mas tem um custo. Em primeiro lugar, resolver o sistema FEM torna-se mais caro. Em segundo lugar, os algoritmos que podem manipular uma grande quantidade (vários milhares de elementos não são incomuns) de variáveis discretas com múltiplas restrições não estão disponíveis.Além disso, eles são impratica- mente sensíveis a variações de parâmetros. Na literatura, problemas com até 30000 variáveis foram relatados
Resolvendo o problema com variáveis contínuas
As complexidades declaradas anteriormente com a solução de problemas TO usando variáveis binárias levaram a comunidade a procurar outras opções. Uma é a modelagem das densidades com variáveis contínuas. As densidades de material agora também podem atingir valores entre zero e um. Algoritmos baseados em gradientes que lidam com grandes quantidades de variáveis contínuas e várias restrições estão disponíveis. Mas as propriedades do material precisam ser modeladas em um ambiente contínuo. Isso é feito por interpolação. Uma das metodologias de interpolação mais implementadas é o método SIMP (Solid Isotropic Material with Penalisation). Esta interpolação é essencialmente uma lei de poder . Ele interpola o módulo de Young do material para o campo de seleção escalar. O valor do parâmetro de penalização é geralmente tomada entre . Isto foi mostrado para confirmar a microestrutura dos materiais. No método SIMP, um limite inferior no módulo de Young é adicionado, , para garantir que as derivadas da função objetivo sejam diferentes de zero quando a densidade se torna zero. Quanto maior o fator de penalização, mais o SIMP penaliza o algoritmo no uso de densidades não binárias. Infelizmente, o parâmetro de penalização também introduz não-convexidades).
 . Ele interpola o módulo de Young do material para o campo de seleção escalar. O valor do parâmetro de penalização
. Ele interpola o módulo de Young do material para o campo de seleção escalar. O valor do parâmetro de penalização  é geralmente tomada entre
é geralmente tomada entre ![{\ displaystyle \ scriptstyle [1, \, 3]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/b6b426658716615e9685915e67165f541ca73885) . Isto foi mostrado para confirmar a microestrutura dos materiais. No método SIMP, um limite inferior no módulo de Young é adicionado,
. Isto foi mostrado para confirmar a microestrutura dos materiais. No método SIMP, um limite inferior no módulo de Young é adicionado,  , para garantir que as derivadas da função objetivo sejam diferentes de zero quando a densidade se torna zero. Quanto maior o fator de penalização, mais o SIMP penaliza o algoritmo no uso de densidades não binárias. Infelizmente, o parâmetro de penalização também introduz não-convexidades).
, para garantir que as derivadas da função objetivo sejam diferentes de zero quando a densidade se torna zero. Quanto maior o fator de penalização, mais o SIMP penaliza o algoritmo no uso de densidades não binárias. Infelizmente, o parâmetro de penalização também introduz não-convexidades).Derivados de forma
Derivados topológicos
Selecionar nível
Campo de fase
Otimização Estrutural Evolucionária
Software comercial
Existem vários softwares de otimização de topologia comercial no mercado. A maioria deles usa a otimização de topologia como uma dica de como o projeto ideal deve ser e a reconstrução manual da geometria é necessária. Existem algumas soluções que produzem projetos otimizados prontos para Manufatura Aditiva.
Exemplos
Conformidade estrutural
Uma estrutura rígida é aquela que tem o menor deslocamento possível quando determinado certo conjunto de condições de contorno. Uma medida global dos deslocamentos é a energia de deformação (também chamada de conformidade) da estrutura sob as condições de contorno prescritas. Quanto menor a energia de tensão, maior a rigidez da estrutura. Assim, a declaração do problema envolve o objetivo funcional da energia de tensão que deve ser minimizada.
Em um nível amplo, pode-se visualizar que quanto mais material, menor a deflexão, pois haverá mais material para resistir às cargas. Assim, a otimização requer uma restrição oposta, a restrição de volume. Na realidade, isso é um fator de custo, pois não queremos gastar muito dinheiro com o material. Para obter o material total utilizado, uma integração do campo de seleção sobre o volume pode ser feita.
Finalmente, as equações diferenciais que governam a elasticidade são conectadas de modo a obter a declaração final do problema.

sujeito a:
![\ scriptstyle \ rho \, \ in \, [0, \, 1]](https://wikimedia.org/api/rest_v1/media/math/render/svg/77d91d86c0e856662098acc3e592f71ab5cdeae4)



Mas, uma implementação direta no Finite Element Framework de tal problema ainda é inviável devido a questões como:
Dependência de malha – Malha Dependência significa que o desenho obtido em uma malha não é aquele que será obtido em outra malha. As características do design tornam-se mais complexas à medida que a malha é refinada.
Instabilidades numéricas – A seleção da região na forma de um tabuleiro de xadrez.
Algumas técnicas, como Filtragem baseada em Processamento de imagem, estão sendo usadas atualmente para aliviar alguns desses problemas.
O formulário 3F3D segue a impressão 3D da força
A atual proliferação da tecnologia de impressoras 3D permitiu que projetistas e engenheiros aproveitassem as técnicas de otimização de topologia ao projetar novos produtos.
A otimização de topologia combinada com a impressão 3D permite redução significativa de peso, melhor desempenho estrutural e redução do ciclo de projeto para fabricação.
Problemas multifísicos
Interação fluido-estrutura
Termoeletricidade