В робототехнике роботизированная парадигма представляет собой ментальную модель того, как работает робот. Роботическую парадигму можно описать в отношениях между тремя примитивами робототехники: Sense Plan Act. Его также можно описать тем, как обрабатываются и распределяются сенсорные данные через систему, и где принимаются решения.
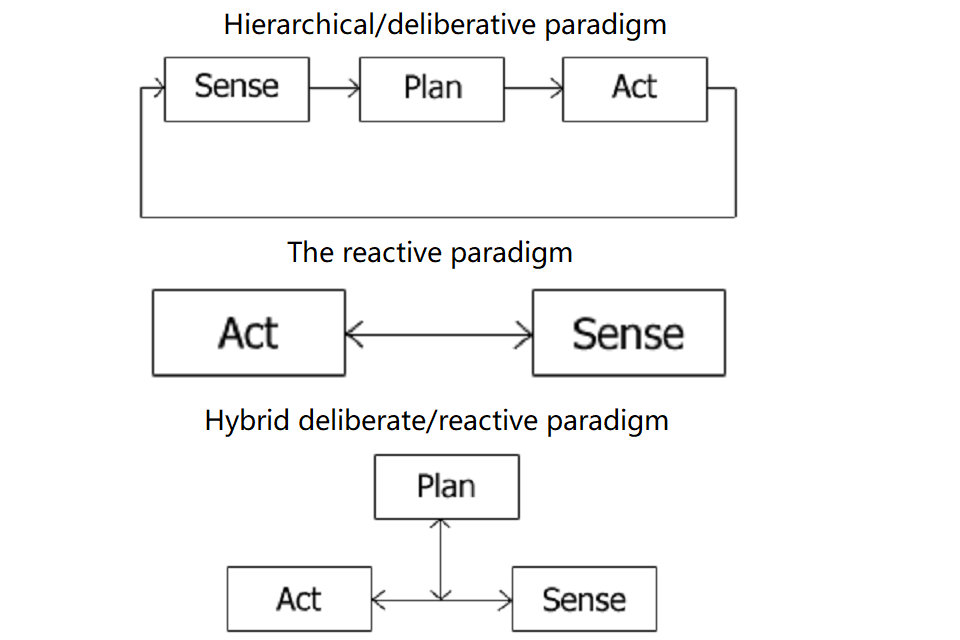
Иерархическая / совещательная парадигма
Робот работает сверху вниз, тяжело планируя.
Робот чувствует мир, планирует следующее действие, действия; на каждом шаге робот явно планирует следующий ход.
Все чувствительные данные, как правило, собираются в одну глобальную модель мира.
Реактивная парадигма
Смысл действия.
У робота есть несколько экземпляров муфт Sense-Act.
Эти муфты являются параллельными процессами, называемыми поведением, которые принимают локальные данные восприятия и вычисляют наилучшие действия независимо от того, что делают другие процессы.
Робот будет выполнять комбинацию поведения.
Гибридная преднамеренная / реактивная парадигма
Робот сначала планирует (предваряет), как наилучшим образом разложить задачу на подзадачи (также называемую «планирование миссии»), а затем, какие подходящие действия выполняют каждая подзадача.
Затем поведение начинает выполняться в соответствии с реактивной парадигмой.
Чувствительная организация также представляет собой смесь Иерархических и Реактивных стилей; данные датчиков направляются на каждое поведение, которое нуждается в этом датчике, но также доступно планировщику для построения ориентированной на задачи глобальной мировой модели.