
医疗机器人(Medical robot)是医学科学中使用的机器人。 它们包括手术机器人。 这些都在大多数遥控操纵器中,它们在一侧使用外科医生的动作来控制另一侧的“效应器”。
类型
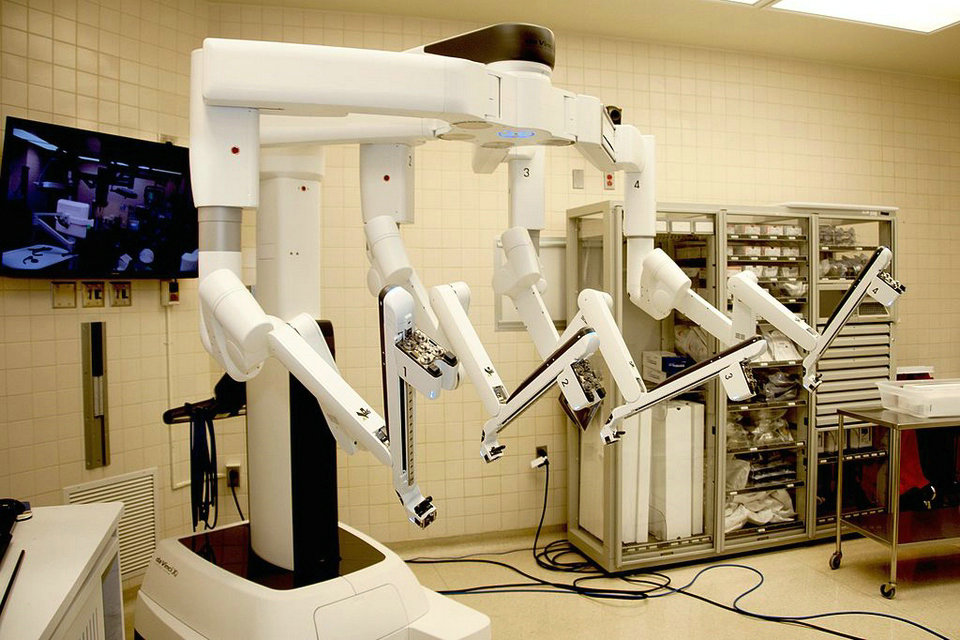
手术机器人:
要么允许外科手术比没有帮助的人类外科医生更精确地进行外科手术,要么允许远程手术,其中人类外科医生不与患者身体在一起。
康复机器人:
促进和支持体弱者,老年人或身体部位功能障碍影响运动的人的生活。 这些机器人还用于康复和相关程序,例如训练和治疗。
Biorobots:
一组机器人,旨在模仿人类和动物的认知。
远程呈现机器人:
允许非现场医疗专业人员从远程位置移动,环顾四周,交流和参与。
药房自动化:
机器人系统,用于在零售药房中分配口服固体或在医院药房中制备无菌IV混合物。
伴侣机器人:
有能力与用户保持联系,让他们保持联系并在健康问题时发出警报。
药物输送自动化
执行固体口服药物管理的机器人或准备无菌IV混合物的机器人。
消毒机器人:
能够在几分钟内对整个房间进行消毒,通常使用脉冲紫外线。 它们被用于对抗埃博拉病毒病。
轮椅机器人
具有检测和导航功能,通过对话然后到目的地。
医疗微型机器人
内置超小型摄像头,可直接将药物注入人体。
历史
世界上第一台手术机器人是Arthrobot,于1983年首次在温哥华开发和使用。该机器人背后的团队由生物医学工程师James McEwen博士组成,他是UBC工程物理研究生Geof Auchinleck ,Brian Day博士,外科医生和一组学生工程。 第一台机器人于1984年3月12日在温哥华UBC医院的整形外科手术中使用。 第一年进行了60多次关节镜手术,并于1985年制作了一部关于国家地理工业机器人机器人革命的纪录片。
除了通过语音指令给出手术器械的这种机器人辅助外科医生之外,可以提及同时开发的医疗实验室的机器人手臂等机器人装置。
Computer Motion公司是AESOP医疗机器人领域的先驱,在加拿大使用,在欧洲使用ZEUS。 2003年,Intuitive Surgical和Computer Motion合并了Intuitive Surgical的名称。 ZEUS然后被放弃,支持达芬奇。
研发的新领导者包括纳米机器人和软机器人。
医疗机器人在使用中
世界各地都在使用许多医疗机器人。 有两种医疗机器人。
一方面,介入机器人,用于外科手术。 今天这个领域最常用的机器人是达芬奇机器人。 它主要在美国和欧洲用于患者的腹腔和胸腔中的各种微创外科手术。 其主要应用是前列腺手术:美国60%的前列腺手术使用了达芬奇。 近年来出现了其他机器人手术系统。 ROSA设备专用于微创颅骨手术,或Sensei治疗心律紊乱。 Cyberknife是另一个例子,用于非侵入性地破坏肿瘤。 它在手术过程中连续跟踪肿瘤和目标的位置。 所谓的内窥镜机器人用于在手术期间通过在内窥镜检查期间握住相机来辅助外科医生。 像EndoAssist或Viky这样的机器人在医院中用于此目的。 最后,一些机器人不直接用于辅助外科手术本身,而是用于手术室的辅助任务。 这是Artis Zeego系统的情况,其使得可以在操作期间实时移动荧光透视系统的成像平面。
另一方面,机器人用于患者的康复,例如中风后。 例如,Lokomat和In-Motion系统就是这种情况,它通过提供机器人辅助来协助患者的康复工作。 关于外骨骼在康复中的使用正在进行大量研究,但这些尚未达到商业阶段。
使用领域
普外科
心胸外科
电
妇科
神经外科
放射科
泌尿科学
限制
目前的设备非常昂贵。 结果,医疗机器人的使用非常少。 与传统手术相比,对患者进行机器人手术的兴趣的评估是有限的,并且一些人提出了主要由机器人操作的外科医生的资格问题,并且当需要传统干预时,他们冒着缺乏经验的风险。
在康复中,使用各种昂贵的机器人。 2018年进行的一项综述,包括比较机器人镜子康复治疗的有效性,与不太复杂的康复治疗相比,尽管公共投资很强,但该领域的研究质量非常低。 因此,作者认为投资这种类型的康复设备是不合理的。