
粒子运动学(Particle Kinematics)是研究粒子的轨迹。 粒子的位置定义为从坐标系的原点到粒子的坐标向量。
非旋转参考系中粒子轨迹的运动学
在最一般的情况下,使用三维坐标系来定义粒子的位置。 但是,如果粒子被约束在表面中移动,则二维坐标系就足够了。 物理学中的所有观察都是不完整的,没有关于参考系描述那些观察结果。
粒子的位置矢量是从参考帧的原点到粒子的矢量。 它表示点与原点的距离及其与原点的方向。 在三维中,点P的位置可以表示为

其中
位置矢量的方向余弦提供方向的定量测量。 重要的是要注意粒子的位置矢量不是唯一的。 给定粒子的位置矢量相对于不同的参考帧是不同的。
粒子的轨迹是时间的矢量函数,
其中坐标x P ,y P和z P各自是时间的函数。
速度和速度变化
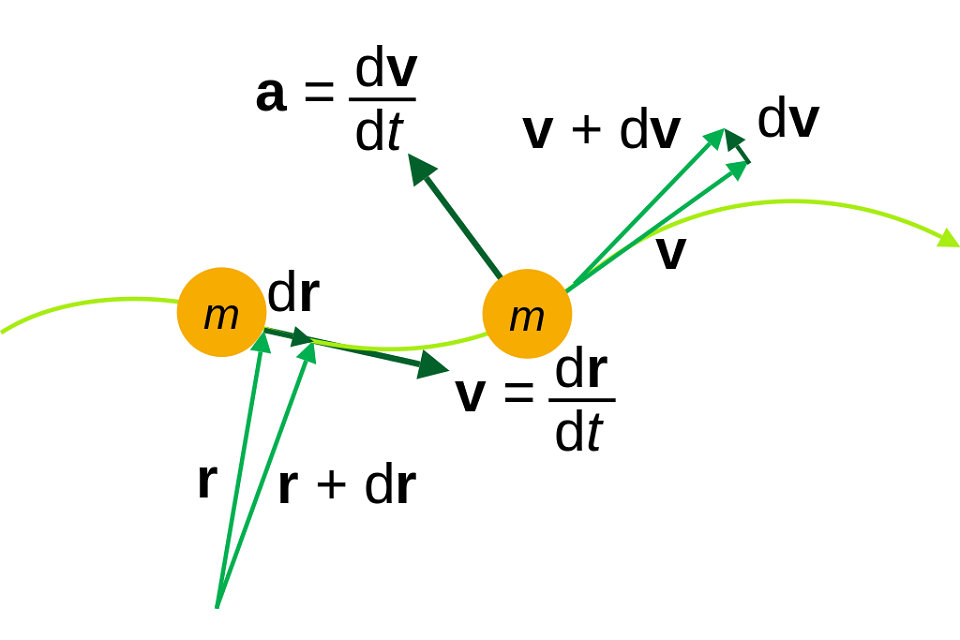
粒子的速度是描述运动方向和粒子运动幅度的矢量。 在数学上,点的位置矢量相对于时间的变化率是点的速度。 考虑通过将粒子的两个位置的差除以时间间隔而形成的比率。 该比率称为该时间间隔内的平均速度,并定义为速度=位移/所用时间
其中ΔP是时间间隔Δt内位置矢量的变化。
在时间间隔Δt变得越来越小的极限中,平均速度成为位置矢量的时间导数,
对象的速度是幅度| V | 它的速度。 这是一个标量:
其中s是沿粒子轨迹测量的弧长。 粒子随时间移动的弧长是非减少量。 因此,ds / dt是非负的,这意味着速度也是非负的。
促进
速度矢量可以在大小和方向上或一次改变。 因此,加速度是速度矢量的大小的变化率加上该矢量的方向变化率。 关于粒子的位置用于定义速度的相同推理可以应用于速度以定义加速度。 粒子的加速度是由速度矢量的变化率定义的矢量。 粒子在一段时间间隔内的平均加速度定义为比率。
其中ΔV是速度矢量的差值,Δt是时间间隔。
当时间间隔接近零时,粒子的加速度是平均加速度的极限,这是时间导数,
要么
物体的加速度的大小是大小| A | 它的加速度矢量。 这是一个标量:
相对位置向量
这是他们的位置向量的组成部分之间的差异。
如果B点有位置分量
那么A点相对于B点的位置就是它们之间的差异:
相对速度
一个点相对于另一个点的速度只是它们的速度之间的差异
这是它们速度的组成部分之间的差异。
如果A点有速度分量
并且B点具有速度分量
那么A点相对于B点的速度就是它们之间的差异:
或者,可以通过计算相对位置矢量R B / A的时间导数来获得相同的结果。
在速度接近光速c(通常在95%以内)的情况下,在狭义相对论中使用另一种称为快速性的相对速度方案,其取决于V与c的比率。
相对加速度
一个点C相对于另一个点B的加速度仅仅是它们的加速度之间的差异。
这是他们的加速度的组成部分之间的差异。
如果C点有加速度分量
和B点有加速度分量
那么C点相对于B点的加速度就是它们之间的差异:
或者,可以通过计算相对位置矢量P B / A的第二时间导数来获得相同的结果。
恒定加速度下的粒子轨迹
对于恒定加速的情况,微分方程式1)可以被积分,因为点P的加速度矢量A在幅度和方向上是恒定的。 据说这一点经历均匀加速的运动。 在这种情况下,可以通过将加速度方程A相对于时间积分来获得速度V(t),然后可以获得颗粒的轨迹P(t)。
假设该位置的初始条件,
第二次积分产生其路径(轨迹),
可以导出位移,速度,加速度和时间之间的附加关系。 由于加速度不变,
通过求解时间的平均加速度并替换和简化,可以得到速度,位置和加速度之间没有明确时间依赖性的关系
其中∘表示点积,这是合适的,因为产品是标量而不是矢量。
点可以用角度的余弦代替
在加速度总是在运动方向上的情况下,矢量之间的角度(
这可以使用矢量大小的符号来简化
这将粒子运动的参数方程减少到速度与位置的笛卡尔关系。 当时间未知时,这种关系很有用。 我们也知道
圆柱极坐标中的粒子轨迹
使用X-Y平面中的极坐标来配制粒子P(t)=(X(t),Y(t)和Z(t))的轨迹通常是方便的。 在这种情况下,其速度和加速度采用方便的形式。
回想一下,粒子P的轨迹由其在固定参考系F中测量的坐标向量P定义。当粒子移动时,其坐标向量P(t)跟踪其轨迹,该轨迹是空间中的曲线,由下式给出:
其中i,j和k分别是沿参考系F的X,Y和Z轴的单位矢量。
考虑仅在圆柱体R(t)=常数的表面上移动的粒子P,可以使固定框架F的Z轴与圆柱体的轴线对齐。然后,在X-Y平面中围绕该轴的角度θ可用于将轨迹定义为,
通过引入径向和切向单位矢量可以简化P(t)的圆柱坐标,
和他们从基本微积分的时间导数:
使用这种表示法,P(t)采用这种形式,
其中R在粒子仅在半径为R的圆柱体表面上移动的情况下是恒定的。
通常,轨迹P(t)不限于位于圆柱上,因此半径R随时间变化,并且圆柱极坐标中的粒子的轨迹变为:
其中R,theta和Z可能是连续可微分的时间函数,为简单起见,函数符号被删除。 速度矢量V P是轨迹P(t)的时间导数,它产生:
类似地,加速度A P是速度V P的时间导数,由下式给出:
术语
恒定半径
如果粒子的轨迹被约束在圆柱体上,那么半径R是恒定的并且速度和加速度矢量简化。 V P的速度是轨迹P(t)的时间导数,
加速度矢量变为:
平面圆形轨迹
当沿Z轴没有移动时,会发生圆柱体上的粒子轨迹的特殊情况:
其中R和Z 0是常数。 在这种情况下,速度V P由下式给出:
其中
是单位矢量eθ绕圆柱z轴的角速度。
粒子P的加速度A P现在由下式给出:
组件
分别称为加速度的径向和切向分量。
角速度和角加速度的表示法通常定义为
所以圆形轨迹的径向和切向加速度分量也写成
在平面中移动的身体中的点轨迹
矩阵表示
平面R 2中的旋转和平移的组合可以由称为均匀变换的某种类型的3×3矩阵表示。 3×3齐次变换由2×2旋转矩阵A(φ)和2×1平移向量d =(d x ,d y )构成,如下:
这些均匀变换对平面z = 1中的点执行刚性变换,即在坐标为p =(x,y,1)的点上。
特别地,让p定义与固定帧F一致的参考帧M中的点的坐标。然后,当M的原点相对于F的原点移位平移矢量d时,相对于F的角度φ旋转。 F的x轴,M中点的F中的新坐标由下式给出:
同构变换表示仿射变换。 这种配方是必要的,因为翻译不是R 2的线性转化。 然而,使用射影几何,使得R 2被认为是R 3的子集,平移变为仿射线性变换。
纯粹的翻译
如果刚体移动使得其参考系M相对于固定框架F不旋转(∅= 0),则该运动称为纯平移。 在这种情况下,身体中每个点的轨迹是M的原点的轨迹d(t)的偏移,即:
因此,对于纯粹平移的物体,体内每个点P的速度和加速度由下式给出:
其中点表示相对于时间的导数,V O和A O分别是移动帧M的原点的速度和加速度。回想M中的坐标向量p是常数,因此其导数为零。
围绕固定轴旋转身体
旋转或角度运动是对物体旋转的描述。 旋转的描述需要一些描述方向的方法。 常见的描述包括欧拉角和由代数产品引起的匝数的运动学。
在下文中,注意力仅限于围绕固定方向的轴的简单旋转。 为方便起见,选择了z轴。
位置
这允许将旋转描述为平面参考系M相对于围绕该共享z轴的固定F的角位置。 M中的坐标p =(x,y)与F中的坐标P =(X,Y)有关,矩阵方程为:
其中
是旋转矩阵,它定义M相对于F的角位置作为时间的函数。
速度
如果点p不在M中移动,则其在F中的速度由下式给出
消除坐标p很方便,并将其写为轨迹P(t)上的一个操作,
矩阵在其中
被称为M相对于F的角速度矩阵。参数ω是角度θ的时间导数,即:
促进
获得F中P(t)的加速度作为速度的时间导数,
变成了
其中
是F上的M的角加速度矩阵
然后旋转的描述涉及这三个量:
角度位置:从旋转轴上的选定原点到对象点的定向距离是定位该点的向量r(t)。 矢量r(t)在垂直于旋转轴的平面上具有一些投影(或等效地,某些分量) r⊥ (t)。 然后,该点的角位置是在已知旋转方向上(通常由右手规则给出)从参考轴(通常是正x轴)到矢量r⊥ (t)的角度θ。
角速度:角速度ω是角位置θ相对于时间t变化的速率:
角速度在图1中由沿着旋转轴指向的矢量Ω表示,其幅度为ω,并且由右旋规则给出的旋转方向确定。
角加速度:角加速度α的大小是角速度ω相对于时间t变化的速率:
通过简单的可变交换,平移运动学方程可以很容易地扩展到平面旋转运动学,以获得恒定的角加速度:
这里θi和θf分别是初始和最终角位置,ωi和ωf分别是初始和最终角速度,α是恒定角加速度。 虽然空间中的位置和空间中的速度都是真矢量(就其在旋转下的特性而言),但角速度也是如此,角度本身不是真正的矢量。
身体中的点轨迹在三维空间中移动
运动学中的重要公式定义了运动物体中的点的速度和加速度,因为它们在三维空间中追踪轨迹。 这对于身体的质心特别重要,其用于使用牛顿第二定律或拉格朗日方程导出运动方程。
位置
为了定义这些公式,机械系统的组件B的运动由旋转组[A(t)]和组装成均匀变换的平移d(t)[T(t)] = [A]定义。 (t),d(t)]。 如果p是在移动参考系M中测量的B中的点P的坐标,那么在F中跟踪的该点的轨迹由下式给出:
这种表示法不区分P =(X,Y,Z,1)和P =(X,Y,Z),这在上下文中有希望清楚。
可以反转该P的轨迹方程以计算M中的坐标向量p:
这个表达式使用了一个事实,即旋转矩阵的转置也是它的反转,即:
速度
获得点P沿其轨迹P(t)的速度作为该位置矢量的时间导数,
点表示相对于时间的导数; 因为p是常数,其导数为零。
通过对在固定帧F中测量的轨迹P(t)进行操作,可以修改该公式以获得P的速度。将p的逆变换代入速度方程得到:
矩阵[S]由下式给出:
其中
是角速度矩阵。
乘以运算符[S],速度V P的公式采用以下形式:
其中矢量ω是从矩阵[Ω]的分量获得的角速度矢量; 矢量
是P相对于移动框架M的原点O的位置; 和
是原点O的速度。
促进
获得移动体B中的点P的加速度作为其速度矢量的时间导数:
可以通过计算首先扩展该等式
和
现在可以获得加速度A P的公式:
要么
其中α是从角速度矩阵的导数得到的角加速度矢量;
是相对位置矢量(P相对于移动框架M的原点O的位置); 和
是移动框架M的原点的加速度。